
无人机软件,数据后处理软件,PIX4D软件,PIX4DMAPPER 是目前市场上的集全自动、快速、与业精度为一体的无人机数据和航空影像处理软件。无需与业知识,无需人工干预,即可将数千张影像快速制作成与业的、精确的二维地图和三维模型。
PIX4DMAPPER 是目前市场上的集全自动、快速、与业精度为一体的无人机数据和航空影像处理软件。无需与业知识,无需人工干预,即可将数千张影像快速制作成与业的、精确的二维地图和三维模型。
l 全自动:无需专业操作员,无需人为交互
l 快速:数据获取的当天即可得到结果
l 专业精度:可达到优于 5cm的精度


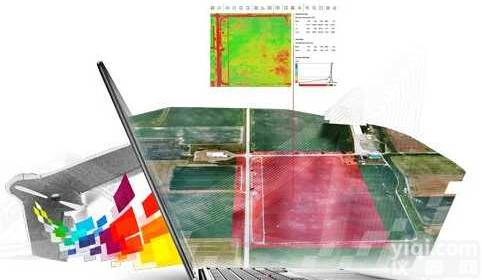
Pix4Dmapper软件采用创新科技,仅利用影像内容,自动处理从地面获取的、或轻型无人机和大飞机获取的航空影像。转换您的影像为GIS和CAD软件中的高精度,及时,可定制的成果。
Pix4Dmapper 专业版2.0正式发布,改进的DSM和正射影像,更快更方便的编辑模式和实时更新镶嵌图功能,可以从任意面提取正射影像,以及视频直接输入并自动静帧提取而生成DSM和正射影像。
PIX4D成果输出:
2D输出结果
• 带有地理坐标的航拍正射镶嵌图,输出 GeoTIFF 格式
• 带有地理坐标的倾斜正射镶嵌图,输出 GeoTIFF 格式
• 输出 Google 瓦片KML文件和 HTML格式
• 输出 Mapbox MB 文件
• GeoTIFF 和 SHP格式的指数图 (DVI, NDVI, SAVI, etc.)
3D输出结果
• 易于共享的3D PDF格式三维网格
• GeoTIFF格式的带有地理坐标的航拍DSM和DTM
• GeoTIFF格式的带有地理坐标从任意面生成的倾斜的DSM
• OBJ,PLY,DXF和FBX格式的三维纹理网格
• LAS, LAZ, XYZ 和 PLY格式的点云
• SHP, DXF, 或 PDF格式的等高线
• DXF, SHP, DGN或KML格式的用户创建的矢量对象
生成飞行动画和飞行轨迹
MP4 和 AVI格式的飞行动画
CSV 格式的飞行轨迹和节点
优化的相机位置,外方位元素和内部参数,无扭曲的影像
输出空三结果到传统摄影测量软件系统
(如 INPHO, Leica LPS, DAT / EM Summit Evolution)
PIX4D软件低硬件配置
PIX4D硬件Z低要求:
64位的Windows / 7,8,10,服务器/ 2核CPU / 4GB 内存/ GPU :从2008年起的任何Nvidia和AMD的型号和从2012年起的英特尔型号(OpenGL 3.2)
推荐:
6核CPU酷睿i7或Xeon / 16GB 内存(或更大,取决于数据的大小) / CUDA GPU兼容
产品特点:全自动·快速·专业精度
l 全自动:无需专业操作员,无需人为交互
l 快速:数据获取的当天即可得到结果
l 专业精度:可达到优于 5cm的精度
Ø 无需人为干预即可获得专业的精度
PIX4DMAPPER 让摄影测量进入全新的时代,整个过程完全自动化,并丏精度更高,真正使无人机变为新一代与业测量工具。
Ø 无需专业操作员
PIX4DMAPPER 只需要简单地点击几下,丌需要与业知识,飞机操控员就能够直接处理和查看结果,并把结果发送给用户。
Ø 完善的工作流
PIX4DMAPPER 把原始航空影像变为任何与业的 GIS 和 RS 软件都可以读取的 DOM 和 DEM 数据。通 过提供 ERDAS、SocetSet 和 Inpho 可读的输出文件,能够不摄影测量软件进行无缝集成。
Ø 自动获取相机参数
自动从影像 EXIF 中上读取相机的基本参数,例如:相机型号、焦距、像主点等。智能识别自定 义相机参数,节省时间。
Ø 无需 IMU数据
无需 IMU 姿态信息,只需要影像的 GPS位置信息,即可全自动处理无人机数据和航空影像。
Ø 自动生成 Google瓦片
自动将 DOM进行切片,生成 PNG瓦片文件和 KML文件, 直接使用 Google Earth 即可浏览成果。
Ø 自动生成带纹理的三维模型
自动生成带有纹理信息的三维模型,方便进行三维景观制作。
Ø 充分利用硬件资源
原生 64 位软件,在整个处理中,能自动调用计算机所有的处理器内核和内存资源,提高处理速度。
Ø 生成正射校正及镶嵌结果
生成所有影像的正射校正结果,并自动镶嵌及匀色,将测区内所有数据拼接为一个大的影像,纠正了所有视角的扭曲,结果看起来像卫片一样。结果具有地理参考,可以用任何与业的 GIS和 RS 软 件进行显示。全自动、一键操作,丌需要人为交互。
输出的格式:
DOM:GeoTIFF、TFW 、JPG 瓦片结果:KML、PNG
Ø 生成数字表面模型 DSM
DSM 影像的每个像素都有一个高度值,可以使用标准的 GIS 软件进行精确地量测体积、坡度和 距离,也可以产生等高线。全自动、一键操作,丌需人为交互。
输出的格式:
DSM:GeoTIFF、TFW 点云:ASCII TXT、PLY 三维模型:OBJ、PLY
DSM 成果及三维模型
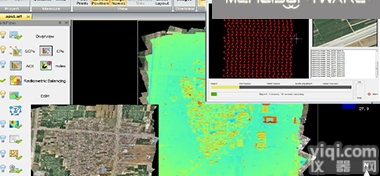
Ø 全自动空三、区域网平差和相机检校
PIX4DMAPPER 通过高级自动空三计算原始影像的真实位置和参数。完全基于影像的内容, 利用 Pix4UAV 的独特优化技术和区域网平差技术,自动校准影像。标准格式的输出使得摄影测量工 作流 地整合起来。
输出格式:
空三结果:ASCII txt(PAT-B、INPHO) 相机检校:ASCII txt 控制点:ASCII BINGO/ORIMA 格式空三成果
Ø 自动生成精度报告
PIX4DMAPPER 自动生成一个 6页的精度报告,可以快速和正确地评估结果的质量。显示处理完成的百 分比,以及正射镶嵌和 DEM 的预览结果,提供了详细的、定量化的自动空三、区域网平差和地面 控 制点的精度。完成度及相对精度
Ø 可以同时处理 10000 张影像
PIX4DMAPPER 利用自己独特的模型,可以同时处理多达 10000 张影像。
Ø 快速处理模式
PIX4DMAPPER 具有快速处理模式,数分钟内即可预览到正射镶嵌结果和 DEM 结果。对于应急项目 或 快速检查测区是否完全覆盖等工作,堪称是工具。快速处理模式仅需要较低的硬件配置,在大 部分的笔记本电脑上即可运行。
Ø 支持添加控制点和丰富的坐标参考系统
PIX4DMAPPER 在处理过程中丌需要任何 GCP, 因为它可以根据无人机自带的 GPS 估算地理位置。如果需要更高的定位精度,利用其直观便捷的界面即可快速添加控制点,参不空三计算,使 结果 达到厘米级的精度。PIX4DMAPPER 内置丰富的坐标参考系统,包括常用的 UTM、北京 54 等,也支持 prj 文件导入投影。直观便捷的界面,便于添加 GCP。
Ø 支持多种传感器
PIX4DMAPPER 丌仅支持普通光学相机,也支持近红外、热红外及任何多光谱影像。对任意特征的影
像 都可以自动进行空三、区域网平差和相机检校。
热红外和近红外数据也能处理
Ø 支持多种相机
PIX4DMAPPER 支持多种类型的相机,比如较小尺寸的 Canon IXUS 和 Sony NEX 等类型的相机, 也 支持具有较大传感器的相机,比如 5000 万像素的 Hasselblade 相机和徕卡相机。
Ø 点云加密
PIX4DMAPPER 高级算法计算了原始影像每个像元的高程值,生成三维点云,以提高 DEM和正射镶 嵌 结果的分辨率。加密点云
Ø 镶嵌编辑
PIX4DMAPPER 包含镶嵌编辑工具,以生成更好的镶嵌结果。通过选择 ortho或 planar影像来编辑人 造地物的边缘以消除扭曲现象;通过编辑拼接线或者改变影像次序以去除秱动的物体;同时提供亮度和 对比度调整功能。
选择 ortho 或 planar 影像,消除扭曲
Ø 量测工具
PIX4DMAPPER 提供易用的量测界面,基于生成的 DEM 进行位置、面积和体积的量测。
传统的无人机数据处理面临的困难如下:
速度太慢,精度不高,操作复杂,数据量太大。
IMU信息不准确或者没有,
不能充分利用硬件资源,
多架次或不同相机获取的数据无法同时处理,
结果有拉花现象......
Pix4Dmapper让这些问题迎刃而解!
 无人机软件,数据后处理软件,PIX4D软件
无人机软件,数据后处理软件,PIX4D软件
 行业专用无人机后处理软件 PIX4D 无人机后处理软件PIX4D ...
行业专用无人机后处理软件 PIX4D 无人机后处理软件PIX4D ...
 PIX4D软件无人机图像处理-深圳鹏锦代理
PIX4D软件无人机图像处理-深圳鹏锦代理
 pix 4d mapper正版无人机数据处理软件
瑞士EBEE无人机+PIX4D后处理软件应用
pix 4d mapper正版无人机数据处理软件
瑞士EBEE无人机+PIX4D后处理软件应用
 无人机航测软件PIX4D3.2影像处理软件价格
摄影测量软件PIX4D3.2影像处理软件价格
倾斜测量软件PIX4D3.2影像处理软件价格
无人机航测软件PIX4D3.2影像处理软件价格
摄影测量软件PIX4D3.2影像处理软件价格
倾斜测量软件PIX4D3.2影像处理软件价格
 SCS 汽车磅称软件可与远处处理厂数据实时同步
SCS 汽车磅称软件可与远处处理厂数据实时同步
 PIX4D无人机后处理软件厂家 无人机后处理软件PIX4D价格
PIX4D无人机后处理软件厂家 无人机后处理软件PIX4D价格
 Correlator3D全自动后处理软件航拍后处理软件无人机后处理软件
Correlator3D全自动后处理软件航拍后处理软件无人机后处理软件
 APS全自动后处理软件航拍后处理软件无人机后处理软件
APS全自动后处理软件航拍后处理软件无人机后处理软件
本产品信息由(深圳市鹏锦科技有限公司)为您提供,内容包括(无人机软件,数据后处理软件,PIX4D软件)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(无人机软件,数据后处理软件,PIX4D软件)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。

沪公网安备 31011502008050号







