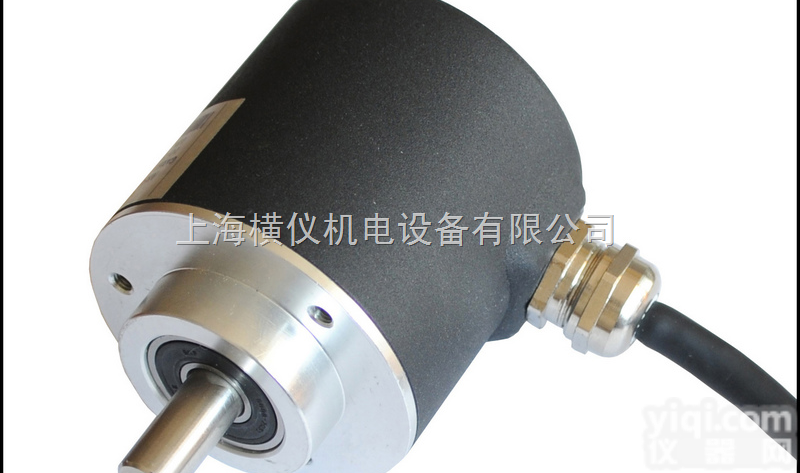
高精度测角系统及编码器的传感探头是圆感应同步器,圆感应同步器是一种电磁感应位置检测元件,由定、转子两个分部件组成,通过定、转子多极平面绕组的互感随位置变化的电磁感应原理实现高精度角度测量。
高精度测角系统及编码器 -- 圆感应同步器



设备概述:
高精度测角系统及编码器的传感探头是圆感应同步器,圆感应同步器是一种电磁感应位置检测元件,由定、转子两个分部件组成,通过定、转子多极平面绕组的互感随位置变化的电磁感应原理实现高精度角度测量。圆感应同步器是一种以金属为基体的传感元件,从而使得基于它的整个测角系统具有极高的可靠性,基于圆感应同步器的高精度测角系统的特性主要体现在如下几个方面:
(1)测角精度高,可达到±3″(峰峰值6″)。
(2)对温度的影响不敏感,可在-40°~+85°的温度范围内工作,
其中传感器探头部分可承受不低于-55°~+100°的工作温度。
(3)耐强冲击,振动。
(4)耐真空,可在1×10-3Pa的真空环境下正常工作。
(5)耐油、液体、灰尘、污垢、盐雾等。
鉴于圆感应同步器的诸多优点,基于它的测角系统在国外历来为军方角度传感器的,尤其在美、日、欧等发达国家的航空航天领域被广泛应用。世界的哈勃望远镜内部就采用了圆感应同步器作为角度传感元件。
基于圆感应同步器的高精度测角系统及编码器可广泛应用在如下领域:
回转工作台、各类机床设备、惯导测试转台、电机、天文望远镜、惯性导航系统等。
设备结构:
一、测角系统
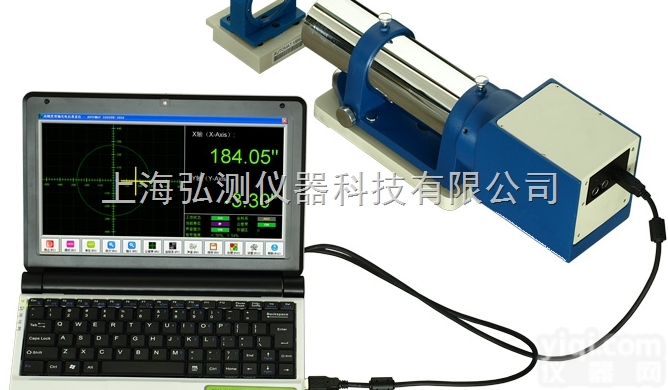
测角统包括传感探头以及处理电路(含测角盒与前放盒)两个部件,传感探头即圆感应同步器,其基体为铝材,又包括定子、转子两部分,其中定子安置在固定位置上,转子安装在旋转轴上,通过转子与定子的相对旋转运动所引起的电磁信号变化进行角度的测量。
测角系统工作时,输出代表角度值的RS422串口信号(或A、B、Z相脉冲信号),传感器每周有一个机械零位(选择RS1或ZS1触发通信模式即可实现此功能)。
主要性能指标:
(1)测角精度:±3″~±15″(峰峰值6″~30″)
(2)转角范围:360°连续
(3)工作温度:0℃~50℃(C级);-20℃~55℃(I级)
1.1系统组成
图1.1测角系统组成图
1.2产品使用说明及参数规格表
1、传感器探头;2、线缆L1;3、线缆L2;
4、前放盒;5、线缆L3;6、测角盒;
7、线缆L4。(1~7各部件在测角系统中的分布可见图1.1)
(1)传感探头分为两部分:定子和转子,其中定子安装在固定台体上,转子安装在转轴上,传感探头的信号输出端在定子上,
激励端根据具体传感探头型号可在转子上,也可在定子上。
(2)传感探头上的激励端通过线缆L1与前放盒连接;传感探头上的信号输出端通过线缆L2与前放盒连接。
(3)前放盒通过线缆L3与测角盒连接,测角盒引出线缆L4(电源)及DB15通信端子。
客户端的电源线缆L4及DB15通信端子接线定义如下:
表1.1电源线缆L4接线定义表
| 插头号 | 信号 | 说明 |
| 1 | V+ | 输入电源正端9~36V(<600mA) |
| 2 | V- | 输入电源负端 |
表1.2 DB15通信端子接线定义表
| 插头号 | RS通信模式(RS422) | ZS通信模式(三相脉冲) | ||
| 信号 | 说明 | 信号 | 说明 | |
| 1 | T422- | 数据-(RS422格式) | A- | A相负脉冲 |
| 2 | T422+ | 数据+(RS422格式) | A+ | A相正脉冲 |
| 3 | CLOCK- | 外同步接收脉冲- | B- | B相负脉冲 |
| 4 | CLOCK+ | 外同步接收脉冲+ | B+ | B相正脉冲 |
| 5 | NC | 空 | Z- | Z相负脉冲 |
| 6 | NC | 空 | Z+ | Z相正脉冲 |
| 7~13 | NC | 空 | NC | 空 |
| 14 | SIN | SIN信号 | SIN | SIN信号 |
| 15 | AGND | 信号参考地 | AGND | 信号参考地 |
注:(1)串口输出线应自制,其中T422-、T422+、CLOCK-、CLOCK+(或A-、A+、
B-、B+、Z-、Z+)要用双绞屏蔽线(屏蔽层接外壳),输出线中不要引出SIN信号
(14脚)和AGND信号(15脚)。
(2)CLOCK-、CLOCK+属于一对差分信号,其电平信号与RS422/485兼容。
(3)SIN信号(14脚)与信号参考地(15脚)作为测试引脚,便于用户监测当前模拟信号;
表1.3传感探头型号及精度一览表(型号前有×表示为无刷型;无×表示为转子出线型)
| 型号 | 定子(mm) | 转子(mm) | 气隙(mm) | 精度等级 (A1/A2) | |||||||||
| DS | LS | dS | GS | HS | DR | LR | dR | GR | HR | h | |||
| T2 | 58 | 52 | 20 | 2.5 | 5 | 42 | 15 | 8 | 2.5 | 5 | 0.15~0.22 | ±10″(峰峰值20″) /±15″(峰峰值30″) | |
| T3 | 78 | 70 | 26 | 3.5 | 5 | 58 | 18 | 12 | 3.5 | 5 | 0.15~0.22 | ±7″/ ±10″ | |
| T4 | 100 | 92 | 36 | 3.5 | 6 | 80 | 30 | 24 | 3 | 6 | 0.15~0.22 | ±6″/±8″ | |
| T6 | 156 | 148 | 68 | 3.5 | 10 | 133 | 58 | 48 | 3.5 | 10 | 0.15~0.22 | ±4″/±6″ | |
| ×T6 | 150 | 140 | 56 | 3.5 | 10 | 126.5 | 51 | 42 | 3.5 | 10 | 0.15~0.22 | ±4″/±6″ | |
| T7 | 180 | 168 | 76 | 5.5 | 10 | 151 | 65 | 54 | 5.5 | 10 | 0.18~0.25 | ±3″/±5″ | |
| ×T7A | 180 | 168 | 76 | 5.5 | 10 | 151 | 65 | 54 | 5.5 | 10 | 0.16~0.23 | ±4″/±6″ | |
| ×T7B | 180 | 168 | 56 | 5.5 | 10 | 151 | 50 | 42 | 4.5 | 10 | 0.16~0.23 | ±3″/±5″ | |
| T9 | 224 | 210 | 106 | 5.5 | 10 | 191 | 90 | 76 | 5.5 | 10 | 0.18~0.25 | ±3″/±5″ | |
| ×T9 | 224 | 213 | 96 | 5.5 | 10 | 195 | 80 | 66 | 5.5 | 10 | 0.18~0.25 | ±3″/±5″ | |
| T12C | 302 | 287 | 140 | 6.5 | 12 | 264 | 125 | 110 | 6.5 | 2 | 0.2~0.3 | ±3″/±5″ | |
| ×T12C | 302 | 287 | 140 | 6.5 | 12 | 264 | 125 | 110 | 6.5 | 12 | 0.2~0.3 | ±3″/±5″ | |
| ×T22 | 546 | 534 | 416 | 7(12个) | 3 | 510 | 402 | 386 | 7(12个) | 23 | 0.25~0.4 | ±5″/±7″ | |
| ×T31 | 774 | 762 | 642 | 7(12个) | 25 | 743 | 624 | 608 | 7(12个) | 25 | 0.3~0.45 | ±6″/±10″ | |
表1.4测角系统性能参数表
| 型号 | 精度等级 | 触发通信模式 | 温度等级 | ||||
| 见 表 1.3 | RS422格式(波特率:115.2Kbps) | A、B、Z三相脉冲格式 | C级: 0℃~+50℃ I级: -20℃~+55℃ | ||||
| 触发 模式 | RS1模式 | RS2模式 | ZS1模式 | ZS2模式 | |||
| 系统开机显示370.XXXX度,并累加计数,直到用户轴按逆(或顺)时针旋转直至触发零点,随后系统整度数值为0,此时开始正常显示角度值。 | 系统内部屏蔽零点功能,开机系统即显示当前角度值。 | 开机A、B相脉冲不进行计数,直到用户轴按逆(或顺)时针旋转直至触发零点,系统输出一个Z相脉冲后正常进行A、B相脉冲计数。 | 系统内部屏蔽零点功能,不输出Z相脉冲,开机系统即可 进行A、B相脉冲计数。 | ||||
| 通信模式 | (1)通过R422口捕捉用户发来的外同步脉冲信号,当捕捉到上升沿之后通过T422口发送一帧角度数据。 (2)T422口发出的一帧角度数据的格式为:1位停止位,1位起始位,其一帧数据为五个字节,一帧数据发送时间约500us(115.2kbps)。个字节为起始字节,中间三个字节为数据字节,第五个字节为校验字节。 个字节:FF(表示数据开始传输); 第二个字节:角度数据的1~8位(低位在前、 高位在后) 第三个字节:角度数据的第9~16位(低位在前、高位在后) 第四个字节:角度数据的第17~24位(低位在前、高位在后)。 第五个字节:和校验(之前三个数据字节之和取低8位) 数据内容定义:24位数据的1~10位为当前角度的整度数值,11~24位为当前角度的小数值。 | (1)A、B相在360°范围内的脉冲数: 0~368640P/R (2)Z相在360°内出现一次脉冲 ,
| |||||
 【高精度】高精度测角系统及编码器-圆感应同步器 编码器 感应器
【高精度】高精度测角系统及编码器-圆感应同步器 编码器 感应器
 高精度角度传感器,多圈电位器,角度编码器 高精度角度传感器,多圈电位器,角度编码器
高精度角度传感器,多圈电位器,角度编码器 高精度角度传感器,多圈电位器,角度编码器
 CAL60系列 高精度并行输出单圈值编码器,高精度并行输出单圈值编码器,高精度...
CAL60系列 高精度并行输出单圈值编码器,高精度并行输出单圈值编码器,高精度...
 GAS60 高精度并行输出单圈值编码器,高精度并行输出单圈值编码器,高精度...
GAS60 高精度并行输出单圈值编码器,高精度并行输出单圈值编码器,高精度...
 DKS 高脉冲编码器 高精度编码器 10000线光电编码器
DKS 高脉冲编码器 高精度编码器 10000线光电编码器
 高脉冲编码器 高精度编码器
高脉冲编码器 高精度编码器
 CAE58-16-10-GCW-S03 CODECHAMP高精度编码器,高精度
CAE58-16-10-GCW-S03 CODECHAMP高精度编码器,高精度
 绿测器MIDORI编码器高精度多极磁尺原装
绿测器MIDORI编码器高精度多极磁尺原装
 ERN1331.051-1024 ID: 375272-02海德汉编码器高精度测量
ERN1331.051-1024 ID: 375272-02海德汉编码器高精度测量
 ZE65M 171-00003 德国TR编码器高精度值
LA66K 312-01600 德国TR编码器高精度值
ZE65M 171-00003 德国TR编码器高精度值
LA66K 312-01600 德国TR编码器高精度值
 不锈钢电子耐压称重传感器,高精度感应器
不锈钢电子耐压称重传感器,高精度感应器
本产品信息由(上海弘测仪器科技有限公司)为您提供,内容包括(【高精度】高精度测角系统及编码器-圆感应同步器 编码器 感应器)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(【高精度】高精度测角系统及编码器-圆感应同步器 编码器 感应器)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。