品牌 其他品牌 产地类别 进口 应用领域 建筑/建材/家具
瑞士 PIX4D无人机航测软件 全自动生成数据
PIX4D同一个项目支持多个相机
采用多个相机创建项目,一起处理数据(如近红外与红绿蓝彩色)
PIX4D支持标准多镜头
更稳健,更精确,更快速地处理知名厂家(Tetracam, Airinov, MicaSense,
WaldoAir)的多个多波段同步相机组(阵列)数据
多种文件类型(.jpg,单波段或多波段Tiff)
输入多种文件格式,包括单波段和多波段影像
控制点编辑或导入(.csv,.txt)
导入或编辑控制点,提高项目的精度
地方,或任意坐标系,支持米和英尺单位
从已有的坐标系统,或者您定制的本地坐标系选择
支持相机位置和外方位角元素(omega, phi, kappa)
从GPS/IMU计算优化相机位置和外方位角
PIX4D外部点云导入
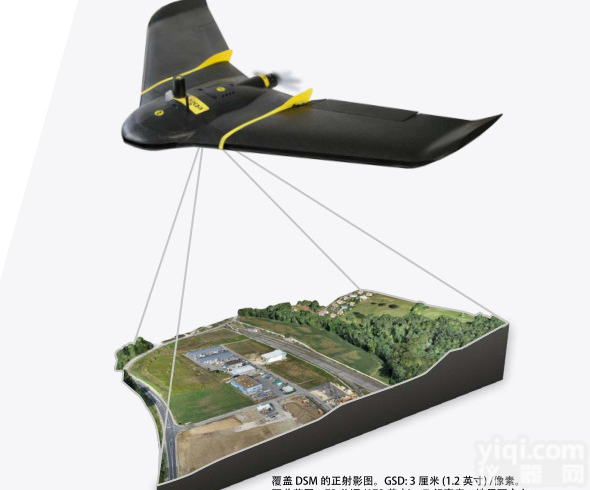
从不同数据源导入点云,如激光扫描LiDAR,用来生成DSM和正射影像镶嵌图
PIX4D数据处理:
快速检查处理模式
数分钟内初步处理项目,得到低分辨率结果
快速检查质量报告
现场评估影像质量和完整性
PIX4D处理模板
通过使用自动或定制的模板自动生成需要的成果
PIX4D相机自检校
优化相机内部参数.如焦距,像主点和镜头畸变.不需要外部软件或第三方的相机校正报告
PIX4D自动空三和光束法区域网平差
无论是否有相机位置和外方位元素都可自动处理
PIX4D自动点云加密,半全局匹配
生产高密度和精细的三维点云,可以作生成DSM和正射影像镶嵌图
PIX4D点云滤波和平滑
使用预设或编辑点云滤波和平滑选项
PIX4D自动点云分类和DTM抽取 (BETA)
自动去除点云中的建筑和植被,生成贴近地面的DTM和等高线.额外的控制,可
以在rayCloud中选择和删除点来改善DTM生成
PIX4D自动亮度和颜色校正
亮度,光照度变化自动补偿,影像颜色自动平衡
PIX4D软件成果输出:
2D输出结果
• 带有地理坐标的航拍正射镶嵌图,输出 GeoTIFF 格式
• 带有地理坐标的倾斜正射镶嵌图,输出 GeoTIFF 格式
• 输出 Google 瓦片KML文件和 HTML格式
• 输出 Mapbox MB 文件
• GeoTIFF 和 SHP格式的指数图 (DVI, NDVI, SAVI, etc.)
3D输出结果
• 易于共享的3D PDF格式三维网格
• GeoTIFF格式的带有地理坐标的航拍DSM和DTM
• GeoTIFF格式的带有地理坐标从任意面生成的倾斜的DSM
• OBJ,PLY,DXF和FBX格式的三维纹理网格
• LAS, LAZ, XYZ 和 PLY格式的点云
• SHP, DXF, 或 PDF格式的等高线
• DXF, SHP, DGN或KML格式的用户创建的矢量对象
生成飞行动画和飞行轨迹
MP4 和 AVI格式的飞行动画
CSV 格式的飞行轨迹和节点
优化的相机位置,外方位元素和内部参数,无扭曲的影像
输出空三结果到传统摄影测量软件系统
(如 INPHO, Leica LPS, DAT / EM Summit Evolution)
技术支持 &更多:
个人支持 获取免费的个人支持
质量报告
评估项目的质量
项目合并
分部单独处理,合并为一个项目
瑞士 PIX4D无人机航测软件 全自动生成数据

本产品信息由(深圳市英飞铭科技有限公司)为您提供,内容包括(瑞士 PIX4D无人机航测软件 全自动生成数据)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(瑞士 PIX4D无人机航测软件 全自动生成数据)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。