品牌 其他品牌
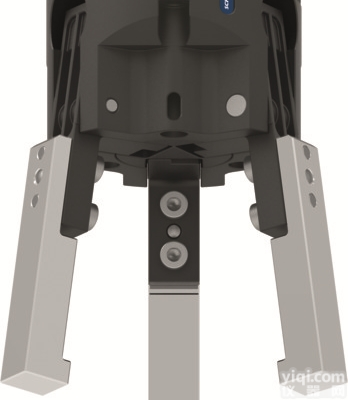
德国雄克schunk机械手 EGL 90-CN 1325754优
EGL 90-CN



ID
1325754
型号
CAN 版本
单指行程 [mm]
42.5
Z小抓取力 [N]
50
抓取力 [N]
600
建议工件重量 [kg]
3
允许手指长度 [mm]
165
每机械手手指的允许质量 [kg]
0.5
重复精度 [mm]
0.05
闭合时间 [s]
0.7
打开时间 [s]
0.7
速度 [mm/s]
150
加速度 [mm/s²]
2500
重量 [kg]
1.8
环境温度 [°C]
5
环境温度 [°C]
55
防护等级 IP
46
长度 X [mm]
112
宽度 Y [mm]
90
高度 Z [mm]
108
控制器电子元件
配套
额定电压 [V DC]
24
通信接口
CAN
参数化接口
USB
工作电流 [A]
2.5
逻辑电流 [A]
0.5
力矩 Mx max. [Nm]
20
力矩 My max. [Nm]
20
力矩 Mz max. [Nm]
20
轴向力 Fz max. [N]
400
i
技术数据表中指定的电流是指从电源中分出的电流。“抓取力”和“手指长度”图形是指 PLC 程序中指定的电机电流。
德国雄克schunk机械手 EGL 90-CN 1325754优
其次是机器人与云端大数据的链接。机器人可以通过语音对话的形式,告诉读者Z热门的科研主题、的导师专家、Z权威的科研机构,扫码后即可获取报告。前来找书的读者,也可以快速找到图书版本与位置信息。未来,“小创”还能带领用户找到书籍所在的区域,帮助用户省去大量的查询时间。

(图为猎豹移动与万方软件的签约仪式)
,则是机器人与系统设备的互动。万方计划将图书馆本地化服务的实际业务和机器人现有的人脸识别、自助讲解功能打通,读者在机器人上可以实现座位预约、科普培训、会议服务、、读报读书等多种功能,完成机器人与图书馆系统与设备的无缝链接。
抱着打通三重链接使命的机器人“小创”,跟着万方的工作人员首先来到了西南地区的大学图书馆,其中一所就是夏天所在的大学。如今,“小创”已在全国上百家图书馆提供讲解和语音导览服务,吸引不少读者前来图书馆互动。当地媒体重庆卫视也对“小创”的“上岗”进行了报道。
 EGL 90-CN 1325754 德国雄克schunk机械手 EGL 90-CN 1325754优
EGL 90-CN 1325754 德国雄克schunk机械手 EGL 90-CN 1325754优
 303313 PZN+125-1 SCHUNK机械手夹具 德国雄克SCHUNK模块 气缸 ZX架
303313 PZN+125-1 SCHUNK机械手夹具 德国雄克SCHUNK模块 气缸 ZX架
 IN 60/S-M8 SCHUNK机械手夹具 德国雄克SCHUNK模块
IN 60/S-M8 SCHUNK机械手夹具 德国雄克SCHUNK模块
 MPG40 0340012 SCHUNK机械手夹具 德国雄克SCHUNK模块 气缸 ZX架
MPG40 0340012 SCHUNK机械手夹具 德国雄克SCHUNK模块 气缸 ZX架
 1325754 EGL 90-CN 新开发schunk机械手- 1325754 EGL 90-CN
1325754 EGL 90-CN 新开发schunk机械手- 1325754 EGL 90-CN
 RH905 360110 德国雄克SCHUNK机械手 夹具 机械爪手卡盘 自动夹具系统
RH905 360110 德国雄克SCHUNK机械手 夹具 机械爪手卡盘 自动夹具系统
 FESTO机械手单元HSW,德国费斯托FESTO机械手单元HSW
DHEB系列德国费斯托气囊式抓手/德国festo机械手
【德国BECK包装食品自动化机械手臂真空压力开关】【德国BECKZG】
FESTO机械手单元HSW,德国费斯托FESTO机械手单元HSW
DHEB系列德国费斯托气囊式抓手/德国festo机械手
【德国BECK包装食品自动化机械手臂真空压力开关】【德国BECKZG】
 机械手报警器 机械厂家 机械手价格 家用机械手报警器 机械手报警器安装
机械手报警器 机械厂家 机械手价格 家用机械手报警器 机械手报警器安装
 原装进口KUKA一手货源德国库卡机器人模具机械手臂BK1048681
原装进口KUKA一手货源德国库卡机器人模具机械手臂BK1048681
 原装进口KUKA一手货源德国库卡机器人模具机械手臂00-138-205
原装进口KUKA一手货源德国库卡机器人模具机械手臂00-138-205
本产品信息由(莘锝工业控制设备(上海)有限公司)为您提供,内容包括(EGL 90-CN 1325754 德国雄克schunk机械手 EGL 90-CN 1325754优)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(EGL 90-CN 1325754 德国雄克schunk机械手 EGL 90-CN 1325754优)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。