品牌 鑫鹰 产地类别 国产
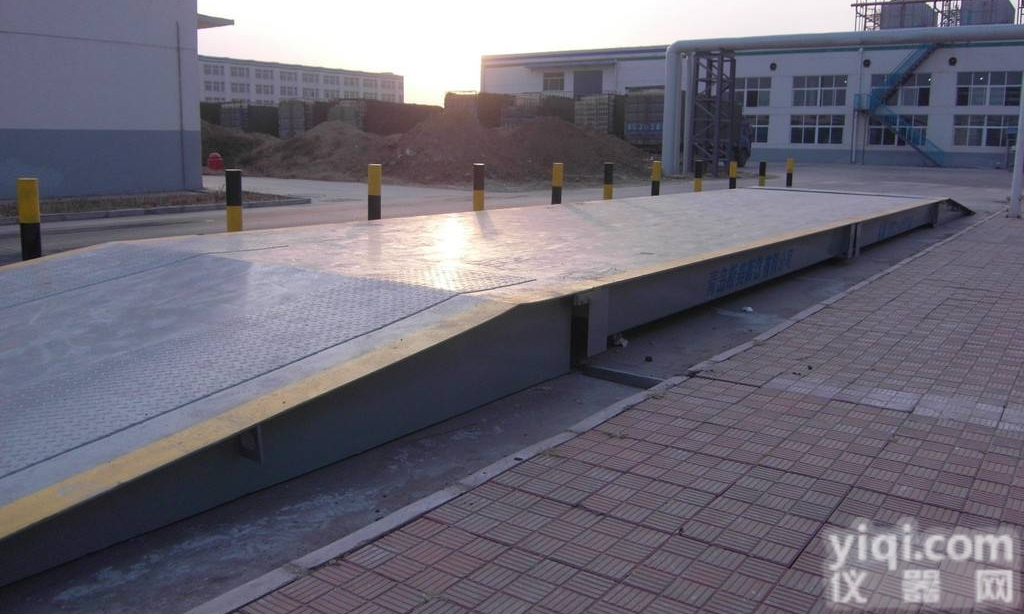
荔浦县100吨汽车衡-电子地磅
三节秤台的地磅8只传感器布置图
1 一2点,3—4点,56点,78点的传感器在加载前的初始零点输出应该是基本相等的。
1278点,四只传感器在加载前的初始零点输出应该是基本相等的。
3456点,四只传感器在加载前的初始零点输出应该是基本相等的。
(1,2,7,8)的传感器初始受力零点输出信号约是(3,4,5,6)的传感器初始受力零点输出信号的二分之一。
当衡器使用数字式称重传感器时,在校秤阶段,可以通过称重仪表很容易地检査出传感器的初始信号输出;即使使用模拟传感器,也可以通过接线盒的线路调整单独连接的某一只传感器,这样也可以获得各个模拟传感器的初始信号输出。
根据前面的分析,传感器的初始信号输出大小应该符合各自的相互关系。当然是存在相对误差的,
这个误差越小越好,一般要小于±20%。
各点传感器输出信号的相互误差对于衡器的出厂校准和现场安装后的校准,都是应该达到的技术
要求。
4.秤台影响传感器初始输出信号的因素
由于秤台是对称设计的,传感器的初始输出信号大小,从理论上说应该符合各点之间的相互关系。但实际上往往存在较大的误差,分析如下:
从设计上来讲,地磅的整体秤台设计有两种方式,一种是“整体刚性连接结构型”,通过 连接螺栓和秤台上的连接板,将三组(多组)秤台紧密的连接在一起。二是独立秤台柔性设计,秤台之间通过销钉和安装板连接,相邻的两个秤台发生变形时允许有一定的翻转角,其相互影响量小。这两种方式,由于秤台在制作过程中有变形,其传感器的初始输出信号是有差异的。
从校秤平台或衡器基础的各个传感器安装墩的水平高度一致性上讲,一般的技术要求是各个基础墩的相互高度误差为3mm,而生产厂内的校秤平台传感器安装的基础高度误差会更小一些,可以达到1mm之内。基础墩高度的不一致,使每只传感器的受力大小不一致,造成传感器初始输出信号有差异。

荔浦县100吨汽车衡-电子地磅
端横梁上各传感器安装板之间的安装高度差,如果制造中没有做好高度定位,也会产生误差,其效果和基础墩的高度误差是一致的。
从秤台的制造质量方面分析,U型梁的厚度一般为6~10mm,制造厂有采用大型宽钢板下料后折弯制成,也有采用钢带直接下料后折弯制成的工艺。U型梁的开口上沿由于制造工艺不良会产生微小的波浪湾,整体的U型梁在弯曲中及后续的存放中也会形成长度方向上的左右弯或者上下弯。由于U型梁弯板采用的材料不同,弯曲产生的尺寸误差不同,也会在U型梁中造成残余应力大小及分布不均匀。
秤台焊接过程中,U型梁需要和秤台面板定位,其与秤台面板的间隙希望越小越好。一是说明 U型梁上表面尺寸正确,另外焊接后的秤台要求是秤台在正常安装后,上表面要凸起一定高度,对秤台施加预应力使得秤台加载后水平,也使秤台在使用中不至于留有水渍而不利于汽车刹车,也便于清扫秤台和保持卫生,所以需要用外力(压力机或砝码重物)压下U型梁,致使其反方向变形,然后再实施焊接过程。从技术上分析,首先将7根U型梁的各个单边与秤台面板焊接在一起,使应力充分释放(必要时可以卸除压力或重物),然后再焊接各个U型梁的另一边,这样整体秤台的应力会小一些。也可以先焊接秤台中间部分的U型梁,然后向两边扩散焊接其余的U型梁。Z不好的工艺就是在秤台受到压力限制产生反向变形时,先焊接秤台Z外边的U形梁然后向中间过渡焊接其余U型梁。
5.秤台制造质量对衡器准确度的影响
秤台制造质量不良,秤台发生纵向或横向变形,秤台中残留了大量的焊接残余应力没有消除,当汽车轮轴行驶在汽车衡秤台的不同位置时,秤台的变形伴随着应力释放,形变重复性就不好。而重量的传递过程中伴随着应力释放,重量的传递数值就会不准确,造成电子汽车衡的称量不稳定,四角误差、段差超出用户要求或标准要求。在校秤过程中,会发现四角误差不易校准,校一遍数据一个样;观察传感器的空秤输出信号,也会出现数据不稳定的状态。
6.消除秤台残余应力的方法
由前面的分析可知,理想的电子汽车衡秤台制造完成后,在校秤阶段,每只传感器的初始信号输出应该符合上述第3部分中传感器受力分析结果。如果差异较大就要进行消除应力的处理。消除应力的方法有很多,下面介绍几种比较简单的方法。