睿强光电激光焊缝跟踪器
睿强光电激光焊缝跟踪器

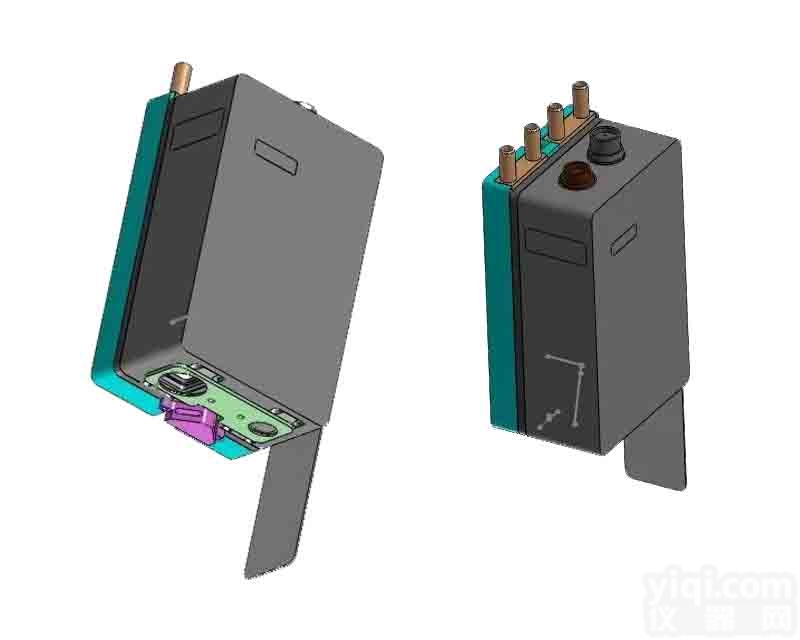
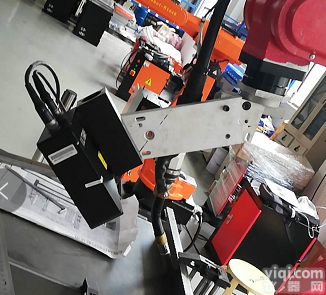
HD6-0050W是一款焊接领域专用传感器,紧凑集成了激光器与高分辨率光学成像系统,配以高防护等级外壳,适合严酷的应用场景。
由于焊接类型非常多,每种焊接类型都 有自己的特殊性,因此HD6-0050W采取开源的软件架构:用户根据传感器得到的XZ轮廓数据,只需要软件开发人员即可进行二次开发,实现各种焊缝跟踪及焊接质量检测应用。
相对国外固定算法的焊接传感器,具有更高的灵活性。为了支持开源架构,传感器附有二次软件开发包,配以开源的应用程序源代码作为应用参考,可以在此基础上快速开发自己需要的应用。
由于软件的开源性,为了配合不同机器人,客户可自行添加任何通讯协议。
•每轮廓1280点
•0.02mm测量分辨率
•100 轮廓/秒采样频率
•千兆以太网数据传输
•IP67级外壳
焊接类型
——
1.V 型焊接 
| 3.阶梯焊接 
|
2.左边焊接/右边焊接 
| 4.点焊接 
|
性能指标
——
| 型号 | HD6-0050W |
工作距离范围 (mm) | 240±60 |
工作视场宽度 (mm) | 60 |
工作距离分辨率 (mm) | 0.05 |
工作视场宽度分辨率 (mm) | 0.06 |
| X轴像素点 | 1280 |
| 采样频率 | 50 Hz |
| 激光光源 | 蓝色半导体激光器 |
| 激光波长 | 405nm |
| 激光等级 | 2类激光器 |
| 外壳防护等级 | IP67 |
| 环境温度 | 0至+45℃ |
| 相对湿度 | 20至85%(无冷凝) |
外形尺寸 (mm) | 120(长)×150(高)×54(厚) |
| 材料 | 铝 |
| 重量 | 约0.5Kg |
系统构成
——

尺寸
——

HD6-0050W是一款焊接领域专用传感器,紧凑集成了激光器与高分辨率光学成像系统,配以高防护等级外壳,适合严酷的应用场景。
由于焊接类型非常多,每种焊接类型都 有自己的特殊性,因此HD6-0050W采取开源的软件架构:用户根据传感器得到的XZ轮廓数据,只需要软件开发人员即可进行二次开发,实现各种焊缝跟踪及焊接质量检测应用。
相对国外固定算法的焊接传感器,具有更高的灵活性。为了支持开源架构,传感器附有二次软件开发包,配以开源的应用程序源代码作为应用参考,可以在此基础上快速开发自己需要的应用。
由于软件的开源性,为了配合不同机器人,客户可自行添加任何通讯协议。
•每轮廓1280点
•0.02mm测量分辨率
•100 轮廓/秒采样频率
•千兆以太网数据传输
•IP67级外壳
焊接类型
——
1.V 型焊接
| 3.阶梯焊接
|
2.左边焊接/右边焊接
| 4.点焊接
|
性能指标
——
| 型号 | HD6-0050W |
工作距离范围 (mm) | 240±60 |
工作视场宽度 (mm) | 60 |
工作距离分辨率 (mm) | 0.05 |
工作视场宽度分辨率 (mm) | 0.06 |
| X轴像素点 | 1280 |
| 采样频率 | 50 Hz |
| 激光光源 | 蓝色半导体激光器 |
| 激光波长 | 405nm |
| 激光等级 | 2类激光器 |
| 外壳防护等级 | IP67 |
| 环境温度 | 0至+45℃ |
| 相对湿度 | 20至85%(无冷凝) |
外形尺寸 (mm) | 120(长)×150(高)×54(厚) |
| 材料 | 铝 |
| 重量 | 约0.5Kg |
系统构成
——
尺寸
——
 HD6-0050 睿强光电激光焊缝跟踪器
HD6-0050 睿强光电激光焊缝跟踪器
 焊缝跟踪,ZG领先的焊缝跟踪器一站式品Pai服务
焊缝跟踪,ZG领先的焊缝跟踪器一站式品Pai服务
 HD6-0050W 3D激光焊缝跟踪器
HD6-0050W 3D激光焊缝跟踪器
 TQY8-FST-1 全自动太阳跟踪器控制器/太阳跟踪器控制器/跟踪器控制器
TQY8-FST-1 全自动太阳跟踪器控制器/太阳跟踪器控制器/跟踪器控制器
 QX-FST-1 全自动太阳跟踪器控制器/太阳跟踪器控制器/跟踪器控制器
QX-FST-1 全自动太阳跟踪器控制器/太阳跟踪器控制器/跟踪器控制器
 TQY8-FST-1 全自动太阳跟踪器控制器 太阳跟踪器控制器 跟踪器控制器
TQY8-FST-1 全自动太阳跟踪器控制器 太阳跟踪器控制器 跟踪器控制器
 DP-FST-1 全自动太阳跟踪器控制器/太阳跟踪器控制器/跟踪器控制器
DP-FST-1 全自动太阳跟踪器控制器/太阳跟踪器控制器/跟踪器控制器
 TQY8-FST-1 全自动太阳跟踪器控制器/太阳跟踪器控制器/跟踪器控制器
TQY8-FST-1 全自动太阳跟踪器控制器/太阳跟踪器控制器/跟踪器控制器
 DL18-FST-1型 太阳跟踪器控制器 自动太阳跟踪器控制器 全自动太阳跟踪器控制器
DL18-FST-1型 太阳跟踪器控制器 自动太阳跟踪器控制器 全自动太阳跟踪器控制器
 拉力机跟踪器/拉力试验机配套使用跟踪器/精密跟踪器厂家
拉力机跟踪器/拉力试验机配套使用跟踪器/精密跟踪器厂家
 TQY8-FST-1 太阳跟踪器控制器 跟踪器控制器
TQY8-FST-1 太阳跟踪器控制器 跟踪器控制器
 TQY8-FST-1 全自动太阳跟踪器控制器 太阳跟踪器控制器
TQY8-FST-1 全自动太阳跟踪器控制器 太阳跟踪器控制器
本产品信息由(苏州睿强光电科技有限公司)为您提供,内容包括(HD6-0050 睿强光电激光焊缝跟踪器)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(HD6-0050 睿强光电激光焊缝跟踪器)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。