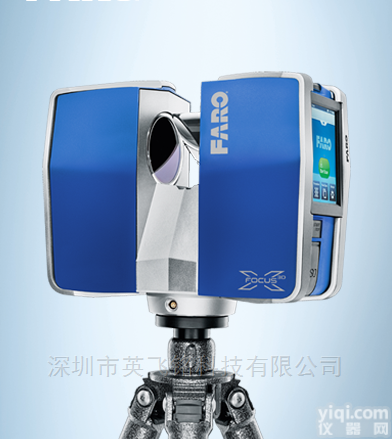
FARO X330 技术指标
扫描距离Focus3DX3301: 0.6米- 330米
测量速度个(点/秒): 122,000 / 244,000 / 488,000 / 976,000
测距误差2: ±2毫米
测距噪声3 | 为10米 | 为10米- 噪声压缩4 | 为25米 | 为25米- 噪声压缩4 |
为90%反射率时为 | 0.3毫米 | 0.15毫米 | 0.3毫米 | 0.15毫米 |
为10%反射率时为 | 0.4毫米 | 0.2毫米 | 0.5毫米 | 0.25毫米 |
彩色单元
分辨率: 7千万像素色彩
动态彩色特性: 自动亮度适应
垂直视野: 300° 水平视野: 360°
垂直步长: 0.009°(360°含40,960 三维像素)
水平步长: 0.009°(360°含40,960 三维像素)
垂直扫描速度: 5,820rpm 或97Hz
激光等级: 激光等级1(人眼安全级别)
波长: 1550纳米
光束发散角: 典型值0.19mrad(0.011°)(1/e, 半角)
出射光直径: 典型值2.25毫米(1/e)
数据存储: SD, SDHC?, SDXC?; 包括32GB的存储卡
扫描仪控制: 通过触摸屏和Wi-Fi
新Wi-Fi(WLAN)接入: 移动设备上使用Flash
进行远程控制、查看和下载扫描数据是可行的。
多传感器
双轴补偿器: 精度0.015°; 范围± 5°
高度传感器: 可通过电子气压计为每次扫描添加相对于某一参考点的高差信息。
指南针5: 电子指南针为扫描数据提供了方位信息,其中包括校准功能。
GPS: 集成式GPS 接收器。
说明:
1室内或室外正入射到90%反射面上
2测距误差定义为扫描器测量距离(从其原点到平面目标上一个点)的误差。
3测距噪声定义为拟合平面的标准偏差。
4噪音压缩算法用于4 个或16 个为一组的平均点,因此以系数2 或4 压缩原始数据噪音。
5铁磁体可干扰地球磁场并导致测量结果不准确。

 法如Focus3D X330三维激光扫描仪出租
法如Focus3D X330三维激光扫描仪出租
 法如 X130 激光扫描仪 土木工程专用
法如 X130 激光扫描仪 土木工程专用
 OKIO-5M 湖南长沙株洲高精度工业级三维3D扫描仪
OKIO-5M 湖南长沙株洲高精度工业级三维3D扫描仪
 RVL6540 TOSOK高速三维3D扫描仪
RVL6540 TOSOK高速三维3D扫描仪
 ESCAN-3D 三维3d扫描仪便携式厂家
ESCAN-3D 三维3d扫描仪便携式厂家
 717 光学追踪三维(3D)扫描仪
717 光学追踪三维(3D)扫描仪
 美国法如Focus3D三维激光扫描仪 数字矿山三维激光扫描仪
美国法如Focus3D三维激光扫描仪 数字矿山三维激光扫描仪
 法如x330三维激光扫描仪
法如x330三维激光扫描仪
 法如 X130 三维激光扫描仪 工业制造专用
法如 X130 三维激光扫描仪 工业制造专用
 法如Pai三维激光扫描仪 S350
法如Pai三维激光扫描仪 S350
 FARO Laser Scann 法如FARO三维激光扫描仪
FARO Laser Scann 法如FARO三维激光扫描仪
 大空间三维激光扫描系统三维激光扫描仪三维激光抄数机三维测量机 大空间三维激光扫描系统柔性三维激光扫描仪三维激光抄数机三维测量机
大空间三维激光扫描系统三维激光扫描仪三维激光抄数机三维测量机 大空间三维激光扫描系统柔性三维激光扫描仪三维激光抄数机三维测量机




