六自由度电动运动控制系统
1. eM6-640-3000产品介绍
eM6-640-3000是应用频繁的一款产品,行程640mm, 载荷3000Kg。相关重载荷和轻载荷电动运动系统E2M都可以提供。目前Z大载荷4000Kg。如有需求,请联系我们。eM6-640-3000是六自由度电动运动系统,可应用于列车模拟、汽车模拟、飞行模拟、娱乐模拟机普通研发应用中。
如有任何有关技术或业务信息的疑问,请及时联系我们。
1.1对外报价
eM6-640-3000产品的对外报价是:€ 230,000
2. 交付eM6-640-3000是E2M的标准产品,有标准配置的交付明细。但大部分标配之外的客户需求都可以满足,如:如果文件是非英文版,您可以要求提供英文版。如您有该标配之外的其他要求,请联系我们。
2.1 交付明细
以下交付明细如下:
- 组装好并经过验收的eM6-640-3000电动运动控制系统包括:
· 6个电动缸(包括配有电源及传感器接头的电机)
· 下(三角地面)框架
· 上(三角顶部)框架
· 控制柜,包括电动缸布线
· 实时控制计算机(装在控制柜内)
· eMoveRT 运动实时控制软件(证书),包括运动动感指令运算、以太网主界面(包括第三方界面)
· 3个气动作动筒
· 气动罐
· 气动阀、连接接头及气动软管
· E2M指令图形使用界面GUI软件(证书)
· E2M主机界面API(证书)
· E2M主机案例软件(证书)
- 文件格式:英文版PDF格式
- 订单管理及物流支持
以下选项仅在客户订购时才提供:
· eMC压缩机,静音设计(Z大噪音65dB),3x380-400VAC, 50HZ
· GUI界面,包括19英寸TFT液晶监控器、键盘、鼠标,连接到运行E2M指令GUI软
件的实时控制计算机
· 产品包装交付
· 延长保修期:2或3年(标准保修期为一年)
· 安装及/或调试支持
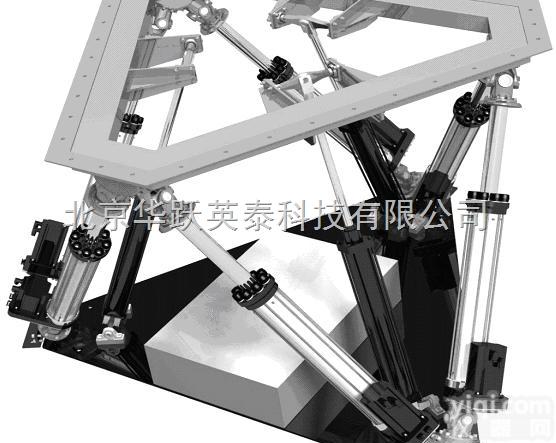
3. 运动系统描述
3.1 eMove eM6-640-3000
eMove eM6-640是专为模拟器系统设计的六自由度电动运动系统。典型应用领域:列车模拟、汽车模拟、飞行模拟、娱乐模拟及普通研发应用。
该运动系统包括:
· 上框架、下框架的机械部件及连接器件;
· 6个行程为640mm的电动缸;
· 控制柜,包括安全制动、控制器和电源;
· 实时控制软件;
· 用户界面软件;
eM6-640系统经过对外观的特殊设计,体型较小,一个集装箱可同时装四台进行运输,到现场后再组装,组装较简单。
eM6-640电动运动系统各部件描述如下:
3.1.1 系统机械部件
3.1.1.1 下框架
下框架是个三角钢板框架,3个连接模块固定在这个三角框架上。控制柜置于电动缸铰链中间空余位置。下框架附加有3个气缸模块和铰链。
该运动系统通过下框架固定在模拟空间的地面。
3.1.1.2 上框架
上框架为肋梁经过加固的三角钢板,上表面紧接模拟舱底。框架拐角使用万向节连接电动缸顶端。万向节固定在框架中间锁定自由度。所有托架和铰链不高于平台上表面。
可以在框架上钻孔。也可以将模拟器结构焊接到上框架。如果有这种需求,框架出厂时表面先不喷刷油漆,而且客户应该在焊接后再将上框架连接或固定到运动系统上。
3.1.1.3 铰链
电动缸与上、下框架的连接装置间使用12个万向节铰链。
3.1.2 电动缸
eMove eM6-640电动运动系统的行程640mm,运行流畅,速度和加速度性能好。电动缸内置缓冲装置。电动缸及其万向节铰链,如图 3.1所示:
图3.1 eM-640电动缸(及连接装置)
电动缸的内外筒可以伸缩,内外筒间滑动摩擦较小。电动缸通过高精度滚珠丝杠实现轴向的移动,螺母连接在内筒,滚珠承接外筒。电机贴紧电动缸,尺寸较小。电机通过能够自调ZX的凯夫拉齿带驱动主轴。这种折叠设计缩短了指定行程的电动缸的长度,有利于驾
驶舱三个电动缸的特殊归置。
3.1.2.1 电机
E2M的电机是高性能交流永磁无刷电机:
· 永磁转子固定在稀土表面上
· 转矩密度高
· 转矩脉动小
· 峰值电流大于三相恒电流Z大值
eMove eM6-640运动系统使用额定电流能够长时间正常运转。
比额定电流大三倍的峰值电流能保证在工作空间任何位置都有足够的加速度或减速度。
3.1.2.2 机械制动
电机配置机械制动器,电动缸不动时,将电机卡在一个固定位置。紧急情况下,紧急制动器起作用。制动器虚拟转矩比电机峰值转矩大很多。
3.1.2.3 传感器
电动缸的位置经过直接装在电机驱动轴上的高精度、高分辨率多圈Sin-Cos编码器测量。运行时不用再次校准。传感器安装在电机传动轴上,被伺服用来进行三相定子电流的整流和反馈速度环信号。
传感器被运动软件用来使电动缸及平台状态复位。
电机定子绕组的温度由温度传感器控制。当温度超过Z高限值,温度传感器会把信号传给伺服驱动从而关掉电机。
3.1.2.4 行程缓冲端
安全系统避免了电动缸失控。 然而电动缸包括行程缓冲装置能够在坏情况下吸收所有动
能和潜能,坏情况即以下几种因素的结合:
· Z大速度
· Z高虚拟质量力(在坏情况下,一个电动缸所承受的质量力)
· Z大净载荷(在坏情况下,电动缸承受的Z大重力)
图3.2 给出行程缓冲终端图片(上面的缓冲端被封闭在电动缸中)
图3.2 行程缓冲端
3.2 气动装置
eM6-640-3000在移动上框架下的三角锥形框架上有3个气动作动筒,旨在补偿平台的重量。优点是:
· 能耗更低
· 减少电动缸动力,以便:
- 提升流畅运转的性能
- 增加电动缸的使用寿命
· 使垂直加速度对称
· 增加载荷承受力
气动装置包括以下(COTs)标准部件:
· 3个气动作动筒(如图3.3所示)
· 压力罐
· 变压阀
· 气动安全阀
· 压力阀
· 内部链接气动软管
· 备选项:低噪音空气压缩机
图3.3 eM6-640气动作动筒
3.2.1 控制柜
控制柜放置在运动系统下框架上。
控制柜内有:
· 6个伺服驱动,使用先进的伺服驱动控制技术,提高了eM6-640运行性能。
· 实时控制计算机,静音设计、可靠性高
· 模块化IO设备,附加数字化模拟IO使扩展更容易
· 配备伺服驱动和IO模块的EtherCAT实时控制计算机界面,快的专业实时Ethernet界面
· 安全电路板(紧急停止按钮),使用经过认证的安全元器件。
· 逻辑电路板
· 主逻辑电路板(配电器、保险丝、开关)
· 回生电阻端子
· 从地面框架上的控制柜中引出6根电机电源线和传感器电线连接电动缸
控制系统和控制柜优化后,零配件更少、线路更少而且排放整齐,降低了产品成本且增加了产品可靠性。另外,控制柜配备了标准的机械配件(非专用电子配件)和认证过的安全部件。
控制柜是为3x380~3x480 VAC电压的网络设备而设计。
安全性已通过EN60204-1(机械电气系统安全标准)测试。在产品出厂前所有功能都已会经过验收测试。
4. 客户定制
4.1 GUI 图形用户界面
GUI用于维护和排解疑难问题,GUI包括:
· 19寸TFT监控器
· 键盘
· 鼠标
使用提供的电线将监控器、键盘和鼠标连接到实时控制计算机上,运行用户界面软件。
客户可以在控制柜旁自己配备的桌面安装GUI软件。
在实时控制计算机上运行用户界面软件时,不需另配笔记本。
图4.1 本地/远程 GUI 架构
5. eM6-640-3000系统配置
5.1 载荷
eM6-640-3000运动系统各种载荷如下表5.1:
Z大运动载荷(GML) | 3000 kg | 包括上框架 |
X轴Z大转动惯量 | 5000 kg ㎡ | 供Hexapod框架参考 |
Y轴Z大转动惯量 | 5000 kg ㎡ | 供Hexapod框架参考 |
Z轴Z大转动惯量 | 5000 kg ㎡ | 供Hexapod框架参考 |
载荷ZX(COG) 离平台几何ZX(MPC) 的高度 | 1000 mm | |
表5.1 各种载荷参数
5.2 性能
该节中描述的性能适用于表5.1中所指载荷。
5.2.1 非同步位移
表5.2给出非同步位移限制,包括单自由度和非单自由度位移。以下非单自由度Z大位移是六自由度及其他自由度系统在非零时的Z大位移。
表5.2给出非同步位移
自由度 | 单自由度位移 | 非单自由度位移 | 单位 |
Z小值 | Z大值 | Z小值 | Z大值 |
前后颠簸 Surge | -0.49 | 0.61 | -0.65 | 0.65 | m |
左右摇摆 Sway | -0.50 | 0.50 | -0.69 | 0.69 | m |
上下起伏 Heave | -0.41 | 0.41 | -0.41 | 0.41 | m |
横滚 Roll | -23.8 | 23.8 | -29.2 | 29.2 | deg |
俯仰 Pitch | -23.8 | 26.1 | -28.5 | 32.8 | deg |
偏航 Yaw | -25.5 | 25.5 | -29.6 | 29.6 | deg |
表5.2 非同步位移值
表5.2中所列的位移值在电动缸未进入缓冲区域前即可达到。
5.2.2 同步位移
图5.1 eM6-640-3000同步位移
请参照图5.1:eM6-640-3000同步位移重要的参数是速度、加速度、加加速度(冲击)。
eM6-640-3000非同步位移的速度加速度和加加速度如表5.3所示:
自由度 | 速度 | 加速度 | 加加速度(冲击) |
前后颠簸 Surge | 0.8 | m/s | 6.3 | m/s² | 200 | m/s3 |
左右摇摆 Sway | 0.8 | m/s | 6.3 | m/s² | 200 | m/s3 |
上下起伏 Heave | 0.6 | m/s | 9.0 | m/s² | 200 | m/s3 |
横滚 Roll | 37 | deg/s | 200 | deg/s² | 6000 | deg/s3 |
俯仰 Pitch | 37 | deg/s | 200 | deg/s² | 6000 | deg/s3 |
偏航 Yaw | 40 | deg/s | 400 | deg/s² | 12000 | deg/s3 |
表5.3 Z大速度、加速度和加加速度(冲击)
5.2.3 反应频率
eM6-640系统ZX在垂直方向移动时,移动参考点(MRP: motion reference point)的反应频率,详见下表 5.4
| | 频率(Hz) | 相位差(deg) | 衰减(dB) |
| | 6 | 90 | 0 ~ -8 |
反应频率 | ≥ 6 | | |
表5.4 反应频率
该系统对激发的反应频率远远大于6 Hz。
5.2.4 噪音值
eM6-640运动系统正弦上下起伏时,在离系统1米远,离地面一米高的位置测量的
噪音< 60dBA,振幅为0.05 m/s, 频率为0.5Hz,
5.3 主电源开关
eM6-640运动系统的电源适用于3x380~3x480 VAC电压,50/60Hz频率的网络设备。
5.4 安装环境
静止(非移动)地板,中等条件安装室。
在eM6-640运行时对环境的要求如下:
· 温度范围: 5℃ ~ 30℃
· 空气湿度:20% ~ 80%,非浓缩
· 高度:在海平面以上,高度< 1000m
产品存放环境:
· 温度范围:-20℃ ~ 50℃
· 空气湿度:10% ~ 90%,非浓缩
5.5 CE/UL 认证
运动系统eM6-640-3000依照CE指令和可应用标准(EN)设计生产:
· 机械指令
· 低压指令
· EMC电磁兼容指令
作为可选项,该系统可配置经过UL(美国保险商实验所)认证过的控制柜。
6. 尺寸
6.1 下框架
eM6-640的下框架是个三角钢板,钢板上固定三个连接模块。控制柜置于电动缸连接点之间的空余空间内。下框架有三个附加气动装置的支架和连接点。
整套系统通过下框架固定在地面上。
图6.1 下框架
6.2 上框架
上框架为肋梁经过加固的三角钢板,上表面紧接模拟舱底。框架拐角使用万向节连接电动缸顶端。万向节固定在框架中间锁定自由度。所有托架和铰链不高于平台上表
图6.2 上框架
6.3 停放高度
该运动系统的安装高度为所有电动缸收缩时的运动系统的高度。
图6.3 停放高度