
 动物步态分析系统、运动足印姿态分析系统、大小鼠步态分析系统、小动物三维步态分析仪
动物步态分析系统、运动足印姿态分析系统、大小鼠步态分析系统、小动物三维步态分析仪
 effectorcell代理,ecifront代理,ECI代理,TAXIScan单细胞运动轨迹跟踪分析仪系统,细胞动态轨迹跟踪分析仪系统,单细胞动态运动轨迹实时分析系统,细胞动态成像分析系统
effectorcell代理,ecifront代理,ECI代理,TAXIScan单细胞运动轨迹跟踪分析仪系统,细胞动态轨迹跟踪分析仪系统,单细胞动态运动轨迹实时分析系统,细胞动态成像分析系统
 HGAS-OXR 激光氧分析仪焦炉煤气氧分析仪系统炼焦炉氧分析系统水煤气分析系统
HGAS-OXR 激光氧分析仪焦炉煤气氧分析仪系统炼焦炉氧分析系统水煤气分析系统
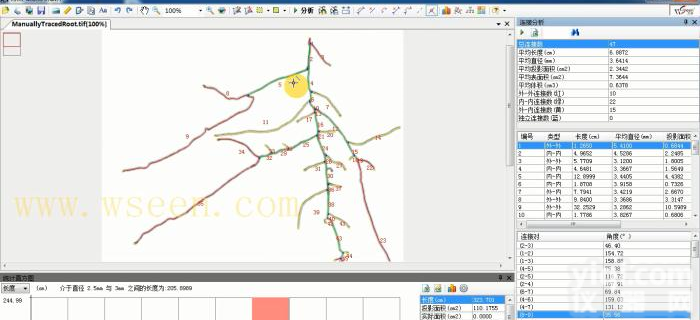
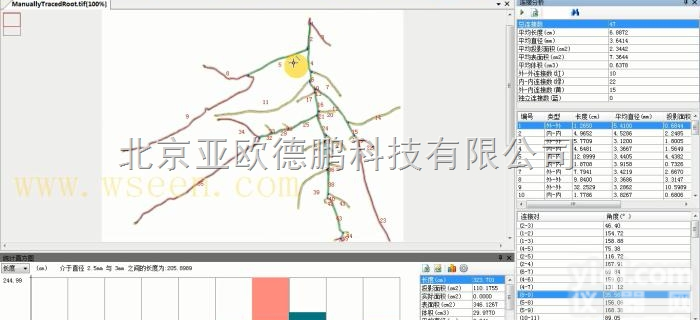
 HAD-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
HAD-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
 HAD-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
HAD-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
 XRS-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
XRS-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
 DP-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
DP-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
 DP-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
DP-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
 RHA-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
RHA-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
 DP-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
DP-LA-S 植物根系分析仪系统 根系分析仪系统 根系分析仪
 EM-3000 专业电脑皮肤分析仪系统/数码智能皮肤分析系统/皮肤分析仪
EM-3000 专业电脑皮肤分析仪系统/数码智能皮肤分析系统/皮肤分析仪
 HAD-LA-S 植物根系分析仪系统 根系分析仪系统
HAD-LA-S 植物根系分析仪系统 根系分析仪系统
本产品信息由(北京智鼠多宝生物科技有限责任公司)为您提供,内容包括(动物步态分析系统、运动足印姿态分析系统、大小鼠步态分析系统、小动物三维步态分析仪)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(动物步态分析系统、运动足印姿态分析系统、大小鼠步态分析系统、小动物三维步态分析仪)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。



