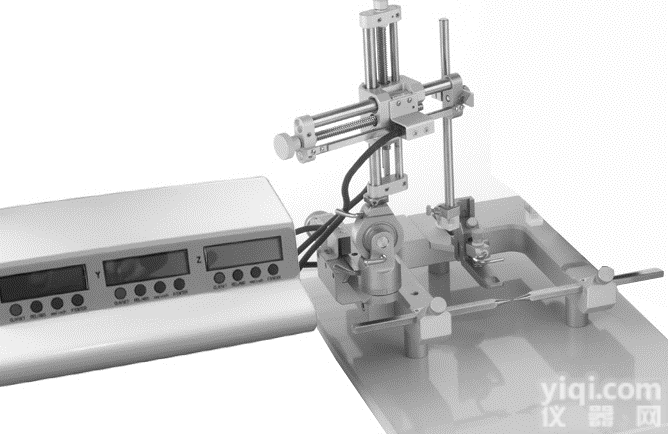
该创新型设计的新型电动数显脑立体定位仪为用户提供了能够在同一平台上可做小鼠和大鼠的定位手术, 电动数显包括定制化的电机和先进的StereoDrive软件,通过计算机在三相正交轴可自动控制立体定位,直观运动控制和集成的脑立体定位图谱确保了JJ的精度性和所有立体定位应用程序的高度使用。
自动化Motorized:
设计适应传统的立体定位系统,StereoDrive软件允许计算机自动进行三维坐标定位控制,集成有Paxinos and Watson’s大鼠或小鼠脑立体定位坐标图谱,直观运动控制和集成的脑立体定位图谱确保了JJ的精度性和所有立体定位应用程序的高度使用。
自动化 StereoDrive软件 (包括电动定位仪)
坐标轴StereoDrive软件集成了精密控制电机,电机运动可以通过使用键盘或鼠标点击屏幕来操作。坐标轴电机运动的3轴(前后囟anterior-posterior,内外侧medial-lateral,和背腹dorsal-ventral)探头放置,关系到三维可视化的大鼠(Paxinos & Watson,第六版)或小鼠 (Watson,第3版)脑图谱。
特点Features:
* 易于校准(Easy calibration);
* 软件-驱动控制定位仪移动;
* 虚拟可视化的探头位置;
* 一微米的分辨率(One micron resolution);
* 坐标图可下载到电脑进行回忆和/或归档;
* 角度调整(Angle adjustments);
* 2轴间可变速(背腹侧dorsal-ventral);
* 集成数字脑图谱(Digital Atlas integration);
* 结构表述(Frame representation);
* 坐标结构校准(Calibration of frame coordinates);
* 逻辑设置的坐标系统(前囱Bregma);
* 坐标轴和可视化的探针图谱;
* 先进的三维可视化选项;
* 立体空间图谱(Spatial Atlas representation);
* 直观的探头控制;
* 直观的导航;
结合Paxinos and Watson’大鼠脑立体定位坐标,直观运动控制和集成的脑立体定位图谱确保了JJ的精度性和所有立体定位应用程序的高度使用。
图像处理包括:Image manipulations include:
空间旋转Spatial Rotation;
固定旋转Fixed Rotation;
缩放Zooming;
平移Panning;
自动化立体定位软件采样器(Motorized Stereotaxic Software Sampler):
1. 图谱窗口(Atlas View);
2. 探针实际位置(逻辑或物理);Actual position of the probe (logical or physical)
3. 轴位可视缩略图-显示的前面后囟移动(X轴)或中间侧面移动(Y轴)的方向;
4. 冠状位缩略图-显示运动在中部横向(y轴)或下面( inferior-superior)(Z轴)方向;
5. 前后囟(Anterior-posterior )(X)驱动控制区域;
6. 中部横向Medio-lateral (Y) 驱动控制区域;
7. Inferior-superior (Z) 驱动控制区域;
8. 探针尖的实际坐标位;
9.可编辑的目标探针尖坐标位;
10.停止按钮(Stop button);
11. 转动按钮(Go To button);
12. Lambda设置按钮-逻辑坐标系统设置;
13. 前囟(Bregma)设置按钮-逻辑坐标系统设置;
14. 工具 -微型硬盘校准(坐标系结构);

 新型电动数显大小鼠脑立体定位仪
新型电动数显大小鼠脑立体定位仪
 北京智鼠多宝数显式脑立体定位仪 DB006-1数显式脑立体定位仪 数显式脑立体定位仪
北京智鼠多宝数显式脑立体定位仪 DB006-1数显式脑立体定位仪 数显式脑立体定位仪
 大鼠脑定位仪 数字式脑立体定位仪 数显式脑立体定位仪 小鼠脑定位仪
大鼠脑定位仪 数字式脑立体定位仪 数显式脑立体定位仪 小鼠脑定位仪
 数显脑定位仪 /数显式脑立体定位仪/大小鼠脑定位仪
数显脑定位仪 /数显式脑立体定位仪/大小鼠脑定位仪
 数显式脑立体定位仪 数字式脑立体定位仪 大鼠脑立体定位仪
数显式脑立体定位仪 数字式脑立体定位仪 大鼠脑立体定位仪
 HB 大鼠定位仪,大鼠脑定位仪,脑立体定位仪,大鼠脑定位仪
HB 大鼠定位仪,大鼠脑定位仪,脑立体定位仪,大鼠脑定位仪
 脑立体定位仪用途 、价格 、 实验步骤、脑立体定位仪厂家、大鼠脑立体定位仪,小鼠脑立体定位仪
脑立体定位仪用途 、价格 、 实验步骤、脑立体定位仪厂家、大鼠脑立体定位仪,小鼠脑立体定位仪








