
5. 球机视频采集器
1) Z小照度:彩色:0.01 Lux @(F1.2,AGC ON)
2) 黑白:0.001Lux @(F1.2,AGC ON)
3) 快门:1秒至1/100,000秒
4) 镜头接口类型:C/CS接口
5) 自动光圈:DC 驱动(-P:支持P-Iris)
6) 日夜转换模式:ICR红外滤片式
7) 宽动态范围:120dB
8) 背光补偿:支持
9) 数字降噪:3D 数字降噪
10)
视频压缩标准:H.264/MPEG4/MJPEG
11)
H.264
编码类型:baseLine Profile/MainProfile/HighProfile
12)
压缩输出码率:32Kbps--16Mbps
13)
音频压缩标准:G.711/G.726
14)
音频压缩码率:64Kbps(G.711)
15)
Z大图像尺寸:1280×960
16)
帧率:50Hz:25fps(1280×960),50fps(1280×720);
17)
具有强光YZ功能
18)
具有电子消抖功能
19)
接口协议:ONVIF,PSIA,CGI,ISAPI,GB28181
20)
支持协议:TCP/IP;ICMP;HTTP;RTCP;
21)
通用功能:一键恢复,防闪烁,三码流,心跳,镜像,密码保护,视频遮盖,水印技术;
22)
IP地址过滤功能
23)
3.5mm音频输入(Mic in/Line in)
24)
输出外部接口:1个内置麦克风
25)
10M/100M自适应以太网口
26)
RS-485接口
27)
RS-232接口
28)
报警输入:1路
29)
报警输出:1路
30)
视频输出:1Vp-p Composite Output(75Ω/BNC)
31)
环境噪声过滤:支持
32)
音频输入输出:支持双声道、立体声;
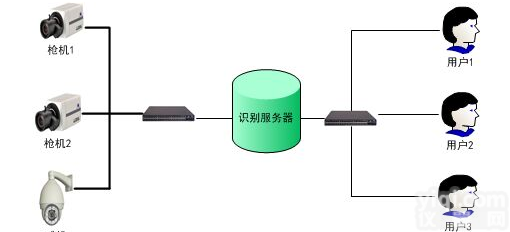
分布式高清视频目标跟踪系统
1) 远程云台控制
2) 网络协议:IPv4/ HTTP,HTTPS, TCP/IP等外部接口
3) 云台控制方向:右、左、上、下、右上、右下、左上和左下。
4) ★云台控制方式:运动目标走出视频ZX区域开始转动,以使摄像机的成像ZX轴移向目标;运动目标处于摄像机ZX视场范围内,云台不转动。
5) 视频采集每一帧图像信息可以得到摄像头视场的ZX位置,目标跟踪算法返回目标质心坐标。
1) ZX端能够联动控制前端设备,进行视频数据的抓捕、摄像、联动、追踪、识别等动作;
2) 尺度过滤要求:监测模块能测定监测区中是否有物体经过并确定是否逆行。如交通中图像差分所产生的噪声、行人、自行车比汽车所占区域小很多,预设计尺度滤波器将尺度较小的物体及噪声滤掉,将差值图像二值化,物体所在区域像素点全标为1,背景点全标为0;设定适当的尺度阀值,把差值图像中面积小于A的区域滤掉。
3) 然后通过行人分类器进行检测获得行人的具体坐标信息
4) 识别分割模块要求:物体边缘是目标基本的特征之一。要求物体运动边缘的检测可以检测出视频数据中的静止物体。
5) 运动跟踪:运动物体建模检测方法要求基于视频数据帧的处理,不能只停留像素级别上,必须要融合图像内容。
6) 要求算法能计算二维运动区域与运动目标三维模型的对应关系进行目标跟踪。能在二维运动的区域中计算与三维模型中线段的对应关系,判别运动区域是否与目标模型相匹配。
7) 匹配特征要求包括:位置、大小、形状、拐点、颜色等,并且这些特征能按照重要性进行权重组合来表示运动物体。
8) kalman滤波算法:用来提高运动跟踪效果。Kalman滤波算法要求不保存过去的测量数据,以减轻滤波装置的存储量和计算量,达到能实时高速行进中进行跟踪目标。
9) 才有优化后的动态目标跟踪算法可以有效稳定的进行目标跟踪。
10)★算法能判别新目标的出现、旧目标的消失、暂时静止等情况。
11)跟踪目标将要走出以视场为ZX的圆形区域时,提取目标特征并保存,发送指令控制云台摄像机迅速转动,云台转动后使跟踪目标再次回到视场ZX区域,以视场ZX点为初始迭代点,计算目标新的位置,镜头变倍后,跟踪目标的大小也会随之发生变化,需要及时根据摄像机的变倍率调整目标的尺寸,完成对目标的持续跟踪。
12)★模糊控制方法:应用系统中,被跟踪目标运动的随机性,很难用精确的数学模型来描述;因此,采用模糊控制的思想来实现对云台的控制,云台模糊控制策略的基本思路是:在目标跟踪算法中定位出目标的质心位置,以该位置与图像ZX位置的偏差作为模糊控制的距离,将这个距离与预先设定的阈值进行比较,得出云台转动的模糊方位控制量,然后计算出云台转动的速度,之后控制云台,使其做间歇性转动,即:每转动一次,停下来计算当前帧中目标质心与视场ZX点的距离,确定是否需要转动及转动的方向,重复这个过程,终使摄像机视场ZX对准目标,始终保持目标在视场范围内。云台的控制遵循TCP/IP协议,能发送开始转动、停止转动的命令来启动和停止转动;因此,在开始和停止命令间必须设置一个延时参数Δt,为云台预留时间来执行相应的动作。据此,云台控制包括摄像机方向控制和摄像机转速控制。
分布式高清视频目标跟踪系统
1) 分布式分端显示;图像信息的切割;云台控制,数据的转换提取;预置位的设置;采集器设备列表;执行电机的控制;开启及撤消;特征抓取。
2) 数据方式与显示设置
3) 异常功能开启与屏蔽
4) 用户管理与权限分配
5) 为用户提供面向局域网和广域网的视频查看与数据共享功能。
6) ★具有分布式设计与模块化结构,C/S网络结构,人性化操作界面,基于网络的分布式视频数据查看,智能报警模式等多样且可灵活设置等功能。
11. 枪机视频采集器数量2个
1) Z小照度:彩色:0.01 Lux @(F1.2,AGC ON)
2) 黑白:0.001Lux @(F1.2,AGC ON)
3) 快门:1秒至1/100,000秒
4) 镜头接口类型:C/CS接口
1) 视频取流
2) 球机控制
3) 视频前景检测
4) 行人运动跟踪
5) 球机自动跟踪
 MPST-IPIZ 分布式高清视频目标跟踪系统
MPST-IPIZ 分布式高清视频目标跟踪系统
 IPTZ分布式高清视频智能目标跟踪科研平台
IPTZ分布式高清视频智能目标跟踪科研平台
 MPTS-IPTZ 分布式高清视频目标跟踪系统
MPTS-IPTZ 分布式高清视频目标跟踪系统
 GO-2000分布光度计(分布式光度计) GO-2000分布光度计(分布式光度计)
GO-2000分布光度计(分布式光度计) GO-2000分布光度计(分布式光度计)
 光纤分布式 OZ 光纤分布式应变与温度传感器
光纤分布式 OZ 光纤分布式应变与温度传感器
 DTU-2000T系列分布式终端单元 DTU-2000T系列分布式终端单元
DTU-2000T系列分布式终端单元 DTU-2000T系列分布式终端单元
 BD/INV306N-7260 网络分布式采集仪 分布式采集仪
BD/INV306N-7260 网络分布式采集仪 分布式采集仪
 DP/INV306N-7260 网络分布式采集仪/分布式采集仪//
DP/INV306N-7260 网络分布式采集仪/分布式采集仪//
 DP/INV306N-7260 网络分布式采集仪/分布式采集仪/
DP/INV306N-7260 网络分布式采集仪/分布式采集仪/
 XRSBD/INV306N-7260 网络分布式采集仪/分布式采集仪
XRSBD/INV306N-7260 网络分布式采集仪/分布式采集仪
 RHA-BD/INV306N-7260 网络分布式采集仪/分布式采集仪
RHA-BD/INV306N-7260 网络分布式采集仪/分布式采集仪
 MHY-17326 网络分布式采集仪/分布式采集仪
MHY-17326 网络分布式采集仪/分布式采集仪
本产品信息由(亿创宏达(北京)科技有限公司)为您提供,内容包括(MPST-IPIZ 分布式高清视频目标跟踪系统)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(MPST-IPIZ 分布式高清视频目标跟踪系统)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。








