
机器人货运码头港口水质水中油在线监测探头
水下机器人 能更好地检测水质
为什么想到用机器人治水?市区有贴沙河、新开河、官河、滩河、江干渠5条河道,目前水质都达到V类及以上,可日常管理有难度。这里老旧小区多,地下管网错综复杂,排污口繁多,改造困难,如何检测水质成为了一道难题。

“在日常河道巡查过程中,由于受河道地形和自然条件限制,难对所有监管河道和排污口实行全面巡查,这使街道在河道长效管理上存在盲点。”现在水上有河长,水下有机器人,等于有了双重保障。

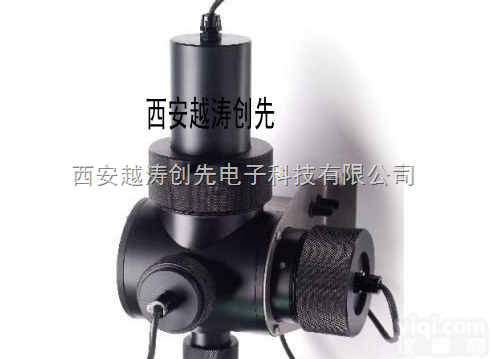
无人水下航行器,由水面设备部分和水下设备部分组成,两部分通过超薄防水双绞线连接。工作人员可用“遥控器”,让机器人进入河道水面以下开展作业。

“若发现排污口,遇到污水,后台能看到明显的颜色变化和水泡。”水下机器人可在高度危险环境、被污染环境以及零可见度的水域代替人工在水下长时间作业。
机器人货运码头港口水质水中油在线监测探头
1.概述
常用的水中油检测有悬浮法(D/λ<=1)、红外分光光度法(不适合低量程)、紫外分光光度法(不适合高量程)等。
深圳市云传物联AMT-Y300智能型水中油传感器,采用荧光法原理,相比常用的几种方法,荧光法更GX快捷重复性较好,并可在线实时监测。传感器具有更出色的重复性和稳定性。带有自动清洁刷,可消除气泡、减少沾污对测量的影响,使维护周期更长,长期在线使用也能保持JJ的稳定性。可水中油的污染起到预警作用。

1.1原理
采用紫外荧光法监测水体中的含油量,根据石油及其中芳香烃化合物和含共轭双键化合物吸收紫外光后发射出的荧光强度定量分析水体中油的浓度。石油类中的芳香烃在紫外光激发下可产生荧光,根据荧光的强度计算出水中油的值。

1.2水中油传感器特点
● 数字传感器,RS-485输出,支持MODBUS
● 带自动清洁刷,消除油污对测量的影响
● 采用独特的光学和电子滤光技术,消除环境光对测量的影响
● 不受水中悬浮物颗粒物的影响

 ATM-W400 机器人货运码头港口水质水中油在线监测探头
ATM-W400 机器人货运码头港口水质水中油在线监测探头
 OIL-8000型在线水中油分析仪水质监测
ATM-W400 机器人轮船码头水质水中油实时在线分析探头
ATM-W400 机器人轮船码头水质水中油实时在线检测探头
ATM-W400 机器人船舶货运港口水质水中油在线检测探头
ATM-W400 机器人船舶货运港口水质水中油在线分析探头
ATM-W400 机器人船舶货运港口水质水中油在线监测探头
OIL-8000型在线水中油分析仪水质监测
ATM-W400 机器人轮船码头水质水中油实时在线分析探头
ATM-W400 机器人轮船码头水质水中油实时在线检测探头
ATM-W400 机器人船舶货运港口水质水中油在线检测探头
ATM-W400 机器人船舶货运港口水质水中油在线分析探头
ATM-W400 机器人船舶货运港口水质水中油在线监测探头
 OIL-2型水中油份浓度计 水中油测定仪 红外法 水中油 水质分析仪
OIL-2型水中油份浓度计 水中油测定仪 红外法 水中油 水质分析仪
 恩德斯 E+H浊度探头CUS41-A2水质分析传感探头
恩德斯 E+H浊度探头CUS41-A2水质分析传感探头
 485信号探头 水质分析仪监测仪厂家直销数字电极/探头
485信号探头 水质分析仪监测仪厂家直销数字电极/探头
 YT02525 英国partech水质监测仪传感器(探头)/污泥浓度监测仪传感器(探头...
WaterWatch2310 英国partech水质监测仪传感器(探头)/污泥浓度监测仪传感器(探头...
YT02525 英国partech水质监测仪传感器(探头)/污泥浓度监测仪传感器(探头...
WaterWatch2310 英国partech水质监测仪传感器(探头)/污泥浓度监测仪传感器(探头...
本产品信息由(深圳市云传物联技术有限公司)为您提供,内容包括(ATM-W400 机器人货运码头港口水质水中油在线监测探头)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(ATM-W400 机器人货运码头港口水质水中油在线监测探头)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。








