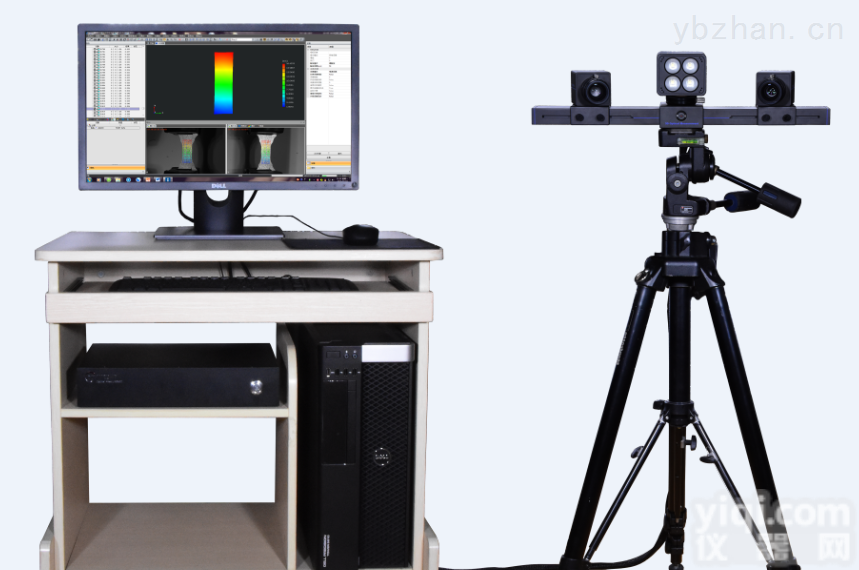
XTOM三维面扫描系统基于双目立体视觉原理,采用国际先进的外差式多频相移三维光学测量技术,单幅测量幅面大小(从30毫米到1米)、测量精度、测量速度等性能都达到国际先进水平,与传统的格雷码加相移方法相比,测量精度更高,单次测量幅面更大、抗干扰能力强、受被测工件表面明暗影响小,而且能够测量表面剧烈变化的工件,可以扫描测量几毫米到几十米的工件和物体。广泛适用于各种需求三维数据的行业,如汽车工业、飞机工业、摩托车外壳及内饰、家电、雕塑等。
系统主要由测量头、控制箱、标定板、标志点、计算机及检测分析软件等组成。
系统应用范围包括:
- 逆向设计:快速获取零部件的表面点云数据,建立三维数模,从而达到产品快速设计的目的。
- 产品检测:生产线产品质量控制和形位尺寸检测,特别适合复杂曲面的检测,可以检测铸件、锻件、冲压件、模具、注塑件、木制品等产品。
- 其它应用:文物扫描和三维显示、牙齿及畸齿矫正、医学整容修复等。
图:双目立体视觉原理 图:投影光栅
1.1 系统特色
- 采用国际先进的外差式多频相移技术,同时也支持格雷码加相移的测量方法
- 根据用户需求,配备一组或多组镜头,可实现多种测量幅面:32mm×24mm、64mm×48mm、128mm×96mm、200mm×150mm、400mm×300mm、800mm×600mm等
- 多线程运算,扫描及计算速度快,单次扫描2~4秒,扫描一次获得130~400万的点
- 扫描过程全自动拼接,支持基于标志点和被测物特征的两种拼接方式
- 扫描效率高,支持手动选区扫描,提高扫描速度和后期处理效率
- 在扫描得到物体三维形状的同时还可以扫描得到并输出纹理信息
- 绝大多数物体无须特殊处理可直接扫描,可以扫描彩色甚至黑色物体
- 后处理功能非常丰富,具备点云优化降噪、点云融合(重叠面删除)、点云补洞、三角化等自动后处理功能
- 辅助分析工具非常丰富,具备点云测距、多种坐标变换、元素拟合、各种角度及尺寸分析功能
- 具备多种数据输出接口:点云(ASC,IGS),三角形网格(STL),纹理贴图(OBJ)
1.2 系统功能
系统的主要功能包括基本测量功能、点云后处理功能,分析报告功能等,具体如下:
(1)基本测量功能:
※测量幅面:支持30毫米到1米的测量幅面,根据需求可实现多种测量幅面:32mm×24mm、64mm×48mm、128mm×96mm、200mm×150mm、400mm×300mm、800mm×600mm等
测量相机:支持一百万到四百万像素相机,支持千兆网、USB2.0、USB3.0等多种接口的相机
扫描预览:在扫描的过程中,系统实时跟踪标志点,显示拼接结果,方便扫描
※扫描模式:非接触式白光光栅扫描,支持格雷码和多频相移两种编码光栅
※相机标定:支持多测头同时标定,支持外部图像标定
※拼接方式:支持基于标志点和基于被测物特征的两种全自动拼接方式
※全局拼接:支持导入摄影测量系统计算的全局点进行测量,提高测量精度
※选区扫描:支持手动选择区域进行扫描,提高扫描速度和后期处理效率
※纹理扫描:在扫描物体三维形状的同时还可以扫描得到并输出纹理信息
※深色物体扫描:绝大多数物体无须特殊处理,可直接扫描
系统测量结果:点云(ASC,PLY,WRL),三角形网格(STL),纹理贴图(OBJ)
多工程测量:系统软件支持多工程测量、显示及分析
探针测量:对于沟槽、空洞等难以扫描的死角,系统具备接触式探针测量功能
支持系统:同时支持32位、64位系统,具备多线程加速计算功能
(2)点云后处理功能
点云采样功能:点云采样功能可以根据需要删减不必要的数据点,提高处理效率
点云平滑功能:具备高斯平滑、双边滤波、特征保持滤波等多种点云平滑方式
※点云融合:系统自动识别多幅重叠点云中的佳数据并融合为一幅点云
※三角化功能:自动将测量的点云进行三角网格化并输出成stl格式
※补洞功能:对于无法扫描和测量的区域,系统可以根据曲率自动将被测物补充完整
(3)分析报告功能
点云测距功能:手动选取两个三维点,测量两点间的三维距离
※坐标转换功能:321转换、参考点拟合、全局点转换、矩阵转换等多种坐标转换功能
※元素创建功能:可以创建三维点、线、面、圆、槽孔、矩形孔、球、圆柱、圆锥等多种三维元素
※分析创建功能:可以创建点点距离、点线距离、点面距离、线线夹角、线面夹角、面面夹角等多种分析
1.3 技术指标
| 指标名称 | 技术指标 |
-
| 核心技术 | 双目立体视觉、多频外差相移 |
-
| 扫描方式 | 非接触式三维白光面扫描方式 |
-
| ※测量幅面 | 支持30毫米到1米的测量幅面,根据需求可实现多种测量幅面:32mm×24mm、64mm×48mm、128mm×96mm、200mm×150mm、400mm×300mm、800mm×600mm等。 |
-
| 测量相机 | 支持一百万到四百万像素相机,支持千兆网、USB2.0、USB3.0等多种接口的相机 |
-
| ※相机标定 | 支持多测头同时标定,支持外部图像标定 |
-
| 单幅扫描精度 | 0.008-0.05mm |
-
| 测量点云间距 | 0.05-0.5mm |
-
| 单次扫描时间 | 2-4s |
-
| 测量结果格式 | 点云(ASC,PLY,WRL),三角形网格(STL),纹理贴图(OBJ) |
-
| ※拼接方式 | 支持基于标志点和基于被测物特征的两种全自动拼接方式 |
-
| ※全局拼接 | 支持导入摄影测量系统计算的全局点进行测量,提高测量精度 |
-
| ※选区扫描 | 支持手动选择区域进行扫描,提高扫描速度和后期处理效率 |
-
| ※纹理扫描 | 在扫描物体三维形状的同时还可以扫描得到并输出纹理信息 |
-
| ※点云后处理 | 具备点云优化降噪、点云融合(重叠面删除)、点云补洞、三角化等自动后处理功能 |
-
| ※分析报告功能 | 具备点云测距、多种坐标变换、元素拟合、各种角度及尺寸分析功能 |
-
| 系统兼容性 | 兼容32位、64位系统 |
1.4 应用案例- 逆向反求
图:逆向工程测量应用案例
- 质量检测
图:质量检测应用案例
- 文化创意
图:文化创意应用案例

 XTOM 供应西交大自主研发三维扫描仪
XTOM 供应西交大自主研发三维扫描仪
 三维测量仪 激光扫描仪 600复合型激光扫描机
三维测量仪 激光扫描仪 600复合型激光扫描机
 Focus3D x330 法如 三维扫描 FARO激光扫描仪 Focus3D X330
Focus3D x330 法如 三维扫描 FARO激光扫描仪 Focus3D X330
 Focus3D 三维/便携式激光扫描仪
Focus3D 三维/便携式激光扫描仪
 三维高性能激光扫描仪
三维高性能激光扫描仪
 2012年新款三维抄数机,鞋楦扫描仪,超高精度,效果超越天远先临
2012年新款三维抄数机,鞋楦扫描仪,超高精度,效果超越天远先临
 RDSbodyscan 国内销售自主研发极速三维人体扫描仪,扫描时间仅为1.25毫秒。
RDSbodyscan 国内销售自主研发极速三维人体扫描仪,扫描时间仅为1.25毫秒。
 RDSbodyscan 西交大自主研发极速静态人体三维扫描仪扫描时间1.25毫秒
RDSbodyscan 西交大自主研发极速静态人体三维扫描仪扫描时间1.25毫秒
 PRINCE775 三维扫描仪(3D scanner)思看科技自主研发
PRINCE775 三维扫描仪(3D scanner)思看科技自主研发
 jh20-1b由南京理工大学科技咨询开发公司自主研发 jh20-1b由南京理工大学科技咨询开发公司自主研发
jh20-1b由南京理工大学科技咨询开发公司自主研发 jh20-1b由南京理工大学科技咨询开发公司自主研发
 自主研发分流器 翔华-自主研发分流器/分流器
自主研发分流器 翔华-自主研发分流器/分流器