应用领域 石油/化工,电子/电气/通讯/半导体,造纸/印刷/包装,航空航天,汽车及零部件
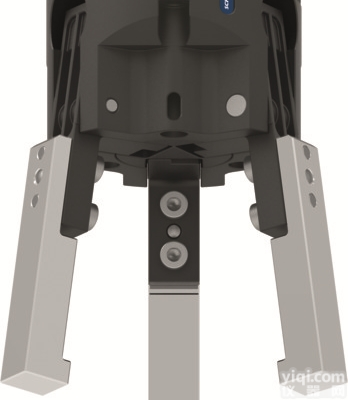
高瞻远瞩德国雄克schunk180°径向机械手楷模
PRG 125-60-AS-HT



ID
39303708
型号
耐高温型号
闭合力(手指长度 0 mm) [N]
5915
每个手爪的张开角度 [°]
60
每个手爪的闭合角度 [°]
3
闭合力矩 [Nm]
265
弹簧产生的闭合力矩 [Nm]
70
重量 [kg]
6.71
建议工件重量 [kg]
6.96
每个双行程的流体消耗量 [cm³]
520
Z小工作压力 [bar]
4
工作压力 [bar]
6.5
额定工作压力 [bar]
6
闭合时间 [s]
0.54
打开时间 [s]
0.79
闭合-/打开时间,带弹簧 [s]
0.7
允许手指长度 [mm]
240
每个卡爪允许质量惯性矩 [kgcm²]
386.8
防护等级 IP
20
环境温度 [°C]
5
环境温度 [°C]
130
重复精度 [mm]
0.1
长度 X [mm]
125
宽度 Y [mm]
72
高度 Z [mm]
220
力矩 Mx max. [Nm]
45
力矩 Mz max. [Nm]
15
轴向力 Fz max. [N]
1770
i
该单元在规定的每个卡爪的转动惯量下,不需要专用的外部节流阀即可驱动。如果转动惯量较大,可能额外需要添加节流阀。
曲线图适用于 90°的型号。对于其他型号,曲线必须按照张开闭合时间平行偏移。
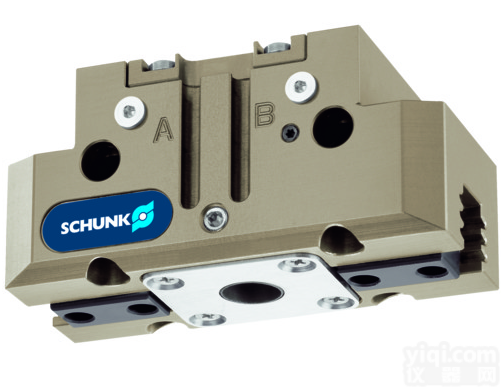
SCHUNK快换系统
机器人末端使用SCHUNK换手系统可增加您应用的多功能性、效率、周期和工艺可靠性.在自动和手动更换系统的帮助下,机械手、工具和其他效应器可快速更换.
在自动化领域中,从小型组件到重载搬运,SCHUNK为机器人应用提供广泛部件组合.由于换手系统的附件模块和配件种类丰富,针对每个应用SCHUNK均可提供适合的解决方案.
高精度自动换刀
SCHUNK更换机械手、刀具及其他执行器时,适当的机器人配件还能显著减少甚至完全取代体力工作.有经验的操作人员需要花费十到三十分钟时间重新装备气动执行器,而SCHUNK快换系统可将此过程的时间减少到几秒,其中锁定和解锁只占几毫秒.
高瞻远瞩德国雄克schunk180°径向机械手楷模
现场参观
“用户和技术对话”活动的用户拜访了不同的工位,亲身体验人机协作的理念,以及多种多样的解决方案。参观过程中展示了各种不同的测试和组装应用,协作取放解决方案以及协作刀具预设和制备的解决方案。参观期间,可以清楚地认识到:目前已可提供具有各类不同优势和能力的多种协作机器人系统的广泛选择。外围设备也在不断扩展。到年底,雄克将提供完整系列的经认证协作机器人机械手,用于各种各样的界面和应用。在该过程中,将有越来越多的智能被集成进部件。

除了取放和装配应用之外,以质量控制和解除繁重体力劳动为目的的应用正迅速在人机协作领域中占据重要地位。
通过对“用户和技术对话”观众的一项会后调查表明:人机协作现在正成为用户的优选。他们一起大致命名了 50 个人机协作应用。约有三分之一人机协作组织已经获取了试点应用的经验,正从评估阶段转入下一阶段:于所选现场实施现实的制造应用的技术。大部分倾向于选择 Universal Robots 和 KUKA 的机器人,但是其他品Pai的协作机器人也在考虑之列。应用的主要领域是取放任务、协助组装应用和内部物流。
 PRG 125-60-AS-HT39303708 高瞻远瞩德国雄克schunk180°径向机械手楷模
PRG 125-60-AS-HT39303708 高瞻远瞩德国雄克schunk180°径向机械手楷模
 DW-AD-504-M12-120 高瞻远瞩 欧美集成商专业IMAV 阀 DBVZ-16A-AS/35
DW-AD-504-M12-120 高瞻远瞩 欧美集成商专业IMAV 阀 DBVZ-16A-AS/35
 8LM2TDL400 欧美专家高瞻远瞩供应 dunkermotoren D554 SNR88943.04075
8LM2TDL400 欧美专家高瞻远瞩供应 dunkermotoren D554 SNR88943.04075
 肥西地埋式一体化污水处理设备《高瞻远瞩》
肥西地埋式一体化污水处理设备《高瞻远瞩》
 WH 随州自来水消毒设备 一览无余 高瞻远瞩
WH 随州自来水消毒设备 一览无余 高瞻远瞩
 江西30吨,40吨汽车地磅高瞻远瞩!
江西30吨,40吨汽车地磅高瞻远瞩!
 DCS 新疆1吨超低台面地磅高瞻远瞩!
DCS 新疆1吨超低台面地磅高瞻远瞩!
 SCS-D 100吨便携式地磅高瞻远瞩!
SCS-D 100吨便携式地磅高瞻远瞩!
 SCS-A 陕西100吨地磅高瞻远瞩!
SCS-A 陕西100吨地磅高瞻远瞩!
 PRG 125-90-HT 39303678 成绩斐然德国雄克schunk180°径向机械手美好
PRG 125-90-AS-HT 39303688 独领前沿德国雄克schunk180°径向机械手实力
PRG 125-90-AS 0303688 独占鳌头德国雄克schunk180°径向机械手超越
PRG 125-90-HT 39303678 成绩斐然德国雄克schunk180°径向机械手美好
PRG 125-90-AS-HT 39303688 独领前沿德国雄克schunk180°径向机械手实力
PRG 125-90-AS 0303688 独占鳌头德国雄克schunk180°径向机械手超越
本产品信息由(莘锝工业控制设备(上海)有限公司)为您提供,内容包括(PRG 125-60-AS-HT39303708 高瞻远瞩德国雄克schunk180°径向机械手楷模)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(PRG 125-60-AS-HT39303708 高瞻远瞩德国雄克schunk180°径向机械手楷模)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。

沪公网安备 31011502008050号