
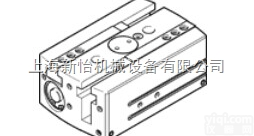
介绍费斯托FESTO平行抓手结构原理
气爪技术:
气爪采用滑动轴承导轨,夹爪和壳体之间存在回转间隙。表中的回转间隙数值采用传统的累加公差方法计算而来。
所示打开和合拢时间 [ms]测量条件为:室温、工作压力6 bar 、气爪水平安装、不带附加气爪手指。用于更大负载 [g]时,气爪必须节流。
随后必须相应地调节打开和合拢时间。
夹紧力与工作压力和杠杆臂的关系可通过以下图表确定。
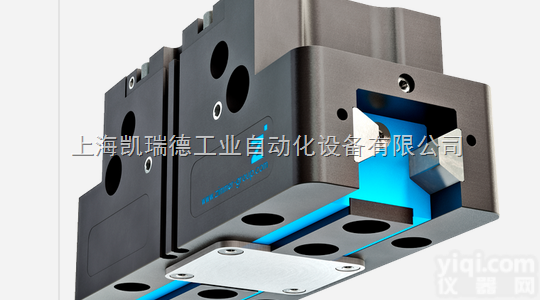
持续感测活塞位置。有一个模拟量输出,模拟量输出信号与活塞位置成正比。
– 可调位置传感器,用于小型气爪
– 可集成接近开关,用于中大型气爪
• 可用作双作用和单作用气爪
• 压缩弹簧用于补偿或保持夹紧力
• 适用于向内或向外抓取
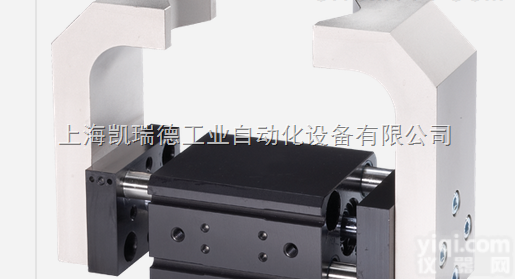
所示的许用力和扭矩适用于单个夹爪。
包括杠杆臂、由工件或外部气爪手指造成的额外应用负载以及运动时产生的加速度和力。
计算扭矩时,必须考虑零点坐标系(夹爪导轨)。
1132936HGPD-16-A47 N3 mm用于接近式传感器
1132937HGPD-16-A-G13 mm用于接近式传感器打开时
1132938HGPD-16-A-G23 mm用于接近式传感器关闭时
1132939HGPD-20-A75 N4 mm用于接近式传感器
1132940HGPD-20-A-G14 mm用于接近式传感器打开时
1132941HGPD-20-A-G24 mm用于接近式传感器关闭时
1132942HGPD-25-A133 N6 mm用于接近式传感器
1132943HGPD-25-A-G16 mm用于接近式传感器打开时
1132944HGPD-25-A-G26 mm用于接近式传感器关闭时
1132945HGPD-35-A267 N8 mm用于接近式传感器
1132946HGPD-35-A-G18 mm用于接近式传感器打开时
1132947HGPD-35-A-G28 mm用于接近式传感器关闭时
1132948HGPD-40-A267 N10 mm用于接近式传感器
1132949HGPD-40-A-G110 mm用于接近式传感器打开时
1132950HGPD-40-A-G210 mm用于接近式传感器关闭时
1132951HGPD-50-A447 N12 mm用于接近式传感器
1132952HGPD-50-A-G112 mm用于接近式传感器打开时
1132953HGPD-50-A-G212 mm用于接近式传感器关闭时
1132954HGPD-63-A928 N16 mm用于接近式传感器
1132955HGPD-63-A-G116 mm用于接近式传感器打开时
1132956HGPD-63-A-G216 mm用于接近式传感器关闭时
1132957HGPD-80-A1858 N20 mm用于接近式传感器 介绍费斯托FESTO平行抓手结构原理
费斯托Festo磁性开关气缸是指在气缸的活塞上安装有磁环,在缸筒上直接安装磁性开关,磁性开关用来检测气缸行程的位置,控制气缸往复运动。因此,就不需要在缸筒上安装行程阀或行程开关来检测气缸活塞位置,也不需要在活塞杆上设置挡块。FESTO气缸工作原理.它是在气缸活塞上安装磁环,在缸筒外壳上装有舌簧开关。开关内装有舌、保护电路和动作指示灯等,均用树脂塑封在一个盒子内。当装有磁铁的活塞运动到舌附近,磁力线通过舌使其磁化,两个被吸引接触,则开关接通。当磁铁返回离开时,磁场减弱,两弹开,则开关断开。由于开关的接通或断开,使电磁阀换向,从而实现气缸的往复运动。
介绍费斯托FESTO平行抓手结构原理
 介绍费斯托FESTO平行抓手结构原理
介绍费斯托FESTO平行抓手结构原理
 1163037 HGDD-35-A 德国festo费斯托三点抓手,费斯托工具ZG代理处
1163037 HGDD-35-A 德国festo费斯托三点抓手,费斯托工具ZG代理处
 1163037 HGDD-35-A 费斯托三点抓手
1163037 HGDD-35-A 费斯托三点抓手
 费斯托HGP-20-A-B平行气爪
费斯托HGP-16-A-B平行气爪
费斯托HGP-20-A-B平行气爪
费斯托HGP-16-A-B平行气爪
 费斯托HGP-10-A-B平行气爪
费斯托HGP-10-A-B平行气爪
 CPE24-M1H-5/3G-3/8 进口费斯托HGPL-25-40-A平行气爪,FESTO MFH-5-1...
CPE24-M1H-5/3G-3/8 进口费斯托HGPL-25-40-A平行气爪,FESTO MFH-5-1...
 GP100-B SOMMER抓手|zimmer平行抓手GP系列常见故障及故障排措
GP19-B SOMMER抓手|zimmer平行抓手GP系列工作原理
GP75-B SOMMER抓手|zimmer平行抓手GP系列技术资料
GP100-B SOMMER抓手|zimmer平行抓手GP系列常见故障及故障排措
GP19-B SOMMER抓手|zimmer平行抓手GP系列工作原理
GP75-B SOMMER抓手|zimmer平行抓手GP系列技术资料
 GP30-B Sommer抓手|Sommer平行抓手MGH8000系列选型资料
GP30-B Sommer抓手|Sommer平行抓手MGH8000系列选型资料
 GP75-B Sommer抓手|Sommer平行抓手GPP1000选型资料
GP75-B Sommer抓手|Sommer平行抓手GPP1000选型资料
本产品信息由(东莞市拓展自动化设备有限公司)为您提供,内容包括(介绍费斯托FESTO平行抓手结构原理)的品牌、型号、技术参数、详细介绍等;如果您想了解更多关于(介绍费斯托FESTO平行抓手结构原理)的信息,请直接联系供应商,给供应商留言。若当前页面内容侵犯到您的权益,请及时告知我们,我们将马上修改或删除。








